

 299
299
介电弹性体被誉为有前途的“人工肌肉”材料,其工作原理类似于三明治结构:上下两层柔性电极,中间夹着一层高分子弹性体薄膜。当通过高压放大器对电极施加电压时,正负电荷在上下表面积累,产生的静电力挤压弹性体薄膜,使其在厚度方向压缩、平面方向扩张,从而产生形变。
在介电弹性体的驱动链条中,高压放大器扮演着无可替代的“能量倍增器”与“波形守护者”角色。
它是电压的“倍增器”。信号发生器或控制器输出的控制信号通常只有几伏,而介电弹性体需要数十至数千伏的驱动电压才能产生有效形变。西安安泰电子的ATA-7000系列高压放大器,单端输出可达40kVp-p(±20kVp),能够满足从基础研究到极端条件测试的各类需求。在典型的介电弹性体驱动实验中,信号源输出正弦波,经高压放大器放大至0-1500V后,施加于电活性聚合物表面,使其产生规律性的收缩形变。
它是波形的“守护者”。介电弹性体的动力学研究要求驱动信号的频率、幅值和波形高度精确。高性能高压放大器具备高保真放大特性,能忠实还原任意波形——无论是正弦波、三角波、方波还是复杂的扫频信号。在偏置型多层介电弹性体驱动器的动态性能测试中,研究人员通过高压放大器施加调幅方波信号和正弦扫频信号,成功捕捉到驱动器在16Hz基频和32Hz倍频下的响应特性,为驱动系统的优化控制提供了关键数据。
它是负载的“驾驭者”。介电弹性体呈现典型的容性负载特性,其阻抗随频率和形变状态变化。先进的高压放大器具备四象限有源输出能力,可在整个输出电压范围内将电流吸收或输出到电抗性或电阻性负载中,对于实现准确的输出响应和各种负载所需的高转换速率至关重要。
案例纵览:高压放大器驱动的介电弹性体应用前沿
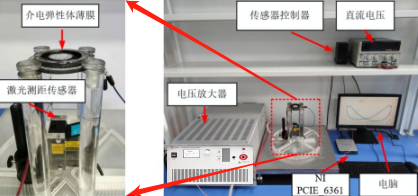
图:高压放大器在介电弹性体驱动器性能测试中的应用
多层驱动器性能测试:揭示“蝶形迟滞”的微观奥秘
在介电弹性体驱动器的性能测试研究中,研究人员搭建了包含信号发生器、高压放大器、激光位移传感器和数据采集系统的完整测试平台。测试对象为介电弹性体膜,两侧涂覆碳导电油脂作为柔性电极。
实验结果显示,当正弦驱动电压幅值从3.5kV增至4.5kV时,介电弹性体驱动器的输出位移显著增大,输入输出响应曲线呈现出与刚性智能材料截然不同的“双回路蝶形迟滞”现象,且在不同电压幅值下呈现非线性变化。这一发现为建立精确的驱动器控制模型、开发迟滞补偿算法提供了关键实验依据。
纯剪切形变驱动器:实现单向往复的精准驱动
为研究人员提出了一种新型介电弹性体驱动器,由弹簧和可产生纯剪切形变的介电弹性体组成。在实验中,ATA-7050高压放大器将驱动电压逐步提升,直至材料被击穿,同时激光位移传感器和压力传感器实时记录伸长量与驱动力数据。
当通入4kV电压后,驱动器的长度显著增加,与静止状态形成鲜明对比。由于外壳上弹簧的存在,介电弹性体薄膜的恢复力与弹簧弹力在驱动方向上维持动态平衡;当电压施加后,麦克斯韦应力打破平衡,驱动器发生位移并在新位置达到新的平衡。这种设计为柔性爬行机器人的驱动提供了理想的“肌肉单元”。
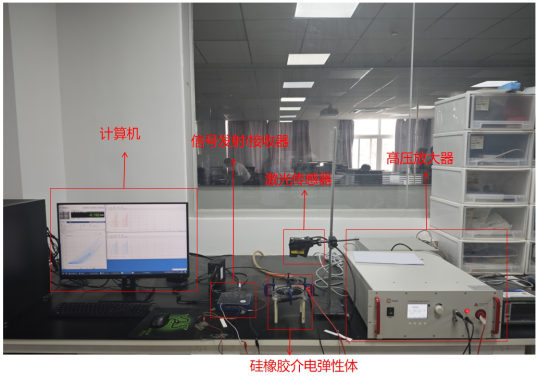
图:介电弹性体性能研究
硅橡胶伸缩控制:波形一致的“电-机械”转换验证
在硅橡胶介电弹性体材料伸缩控制系统实验中,研究人员使用计算机编辑任意波形,经函数发生器输出后,通过高压放大器放大至2kVp-10kVp,驱动材料伸缩运动。激光传感器捕捉材料的伸缩运动幅度波形,并将数据回传至计算机。
实验结果令人振奋:材料呈现出明显的周期性伸张和收缩,计算机上观察到的输出波形与伸缩运动幅度波形完全一致。这一完美对应关系,验证了高压放大器在将电信号转换为机械运动过程中的高保真特性,为后续的精密控制应用奠定了坚实基础。
在上述前沿应用中,国产高压放大器正扮演着日益关键的角色。西安安泰电子的ATA-7000系列高压放大器以40kVp-p最大输出电压、DC至数kHz带宽的优异性能,广泛应用于介电弹性体测试、电活性聚合物研究、软体机器人驱动等领域。
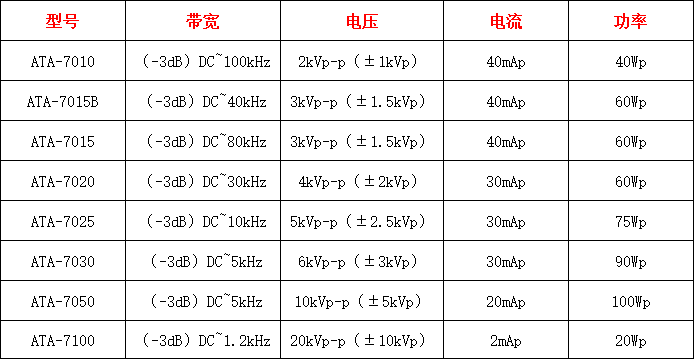
图:ATA-7000系列高压放大器指标参数
从百伏驱动到千伏级测试,从仿生机器鱼到智能假肢——每一次介电弹性体的精准形变与收缩,都始于高压放大器那一次精密的能量注入。它让柔软的“人工肌肉”得以激活,让无声的机械运动成为可能,为柔性机器人时代注入了源源不断的“能量之心”。


