

 615
615
在某些应用场合中,如果需要处理来自多台相机的图像时,则图像记录的精确时间或准确的先后顺序对后续处理至关重要。若相机能够提供时间戳,则可为不同的图像数据建立时间基准。然而,相机的时间基准要能够精确匹配,这一点至关重要。通过使用“精确时间协议”(PTP),HK IDS GigE Vision相机(固件版本2.2或以上)能够轻松实现同步。
借助精确时间协议(PTP)同步HK IDS GigE Vision相机
精确时间协议(PTP)是一种时间同步标准(IEEE1588),它使通过网络连接的设备实现时间同步。支持此标准的相机可在特定的周期内与主时钟交换同步信息。利用各自发送和接收时间中的时间戳信息,相机内部的计数器可实现精确地校准和同步。
所有固件版本为2.2及以上的HK IDS GigE Vision相机都可与PTP兼容!
IEEE1588时间戳是以1970年1月1日0时0分为计时起点,支持1纳秒(1 GHz)的时间分辨率。然而,由于延迟和信号运行时的不准确性,联网设备的时间同步精度达微秒级。
PTP应用案例
PTP作为一种基础协议,通过为图像数据提供时间基准,为各种应用奠定基础。视应用要求及网络基础设施的复杂性的不同,PTP可以通过不同的方式来实现。
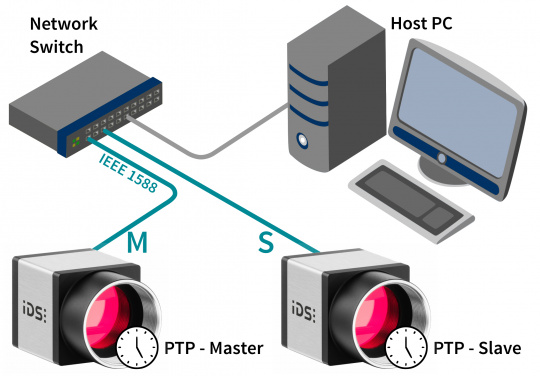
1. 相对时间戳同步
在本案例中,所有相机都在同一个网络。其中一台相机为主服务器,其余相机为从服务器。所有从相机的时间戳与主相机同步。相机既不提供绝对时间戳(实时),同时在无其他操作的情况下,也无法实现同步触发。
优势:
- 在该应用场合中,相对时间戳确定所有相机图像记录的时间分配。此外,相对时间戳还能确定哪一张图像为第一张,以及不同相机的图像时差大小。
- 无需额外的操作和成本,即可为特定的网络基础架构生成相对时间戳。
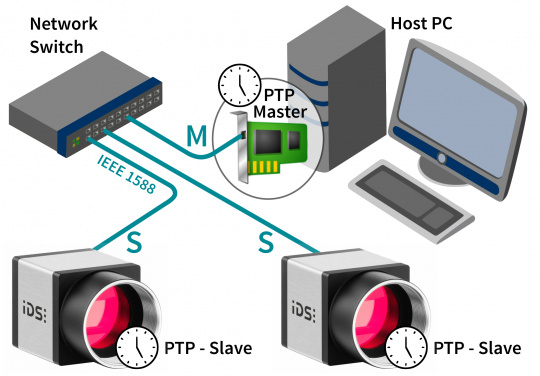
2. 利用绝对时间同步时间戳
本案例中,联网相机与外部主时钟同步。该PTP主时钟可以是支持“硬件时间戳”的网卡——若无硬件支持,同步精度将显著降低。除必要的硬件外,还需要支持PTP的软件。
优势:
- 具备全局(实时)时间戳的图像内容可跨越当前的应用限制,与任何其他使用实时时间基准的信息相关联。
- 对于其它使用全局时间基准的应用场合或评估,图像内容可以重用。
使用PTP:“相对同步”
硬件设置
两台不同的固件版本为2.2(支持PTP)的HK IDS GigE Vision相机(GV-526xFA-C和GV-504xCP-M)连至同一网络交换机。一台额外的主机PC,仅用于控制和配置相机,不涉及相机的PTP同步。
软件设置
可通过“PtpControl”下的相机功能节点图查找所有PTP配置功能。只有固件需为2.2或以上版本的相机才能使用这些功能。我们在主机PC上安装配套软件,来设置PTP同步。
将一台相机配置为PTP主时钟
GV-526xFA-C相机应设置为PTP主时钟。在软件中打开相机,并将“PtpEnable”设为“True”,启用PTP。另外,将“PtpSlaveOnly”设为“False”为相机赋予“主时钟”角色。
# Configure master camera
PtpEnable = True
PtpSlaveOnly = False
将另一台相机配置为PTP从时钟
GV-504xCP-M相机应设为PTP从时钟。同理,将“PtpEnable”设为“True”以启用PTP。此时,这台相机仅作为从时钟使用。将“PtpSlaveOnly”仍设为“True”。
# Configure slave camera
PtpEnable = True
PtpSlaveOnly = True
创建主从等级
在完成主从时钟配置后,主-从等级将自动创建。对于主时钟相机,可通过“PtpStatus”由“Listening ”变成“Master”来确定。对于从时钟相机,可通过“PtpStatus”先由“Listening”变为“Uncalibrated”,并在与主时钟相机同步后变为“Slave”来确定。
在通过相机的新PTP功能完成主从等级创建后,“相对同步”也随之完成。
启用时间戳
如果您希望对图像数据使用已同步相机生成的时间戳,则必须将时间戳作为元数据,启用元数据(及块数据)传输。
首先,将“ChunkModeActive”设为“True”,以通过图像缓冲区启用块数据传输。然后,通过“ChunkSelector”选择“Timestamp”,并通过“ChunkEnable”开关启用时间戳。
# activate chunk data creation
ChunkModeActive = True
# enable "ChunkTimestamp"
ChunkSelector = Timestamp
ChunkEnable = True
这时,相机所采集的每一张图像将具备相应的时间戳,并借助图像缓冲区(通过块数据)传输至主机PC。这样,块数据及时间戳可通过任何视觉标准软件进行读取。
图像采集
如果应用中需要对带时间戳的图像数据进行处理,则图像的记录时间和相机的触发至关重要。这种情况取决于来自多台相机的图像是否需要完全相同的采集时间(同步图像采集)以及时间关联偏差(时间戳抖动)有多大。根据应用要求,须选择适合相机的触发模式。在做出这一选择时,要考虑的决定性的因素不仅包括不同软件和硬件信号模式的精度,也包括部署和使用所需操作和成本。为检查先前配置的“相对同步”,我们使用每秒脉冲数(PPS)信号来触发相机,以实现同步自由运行。
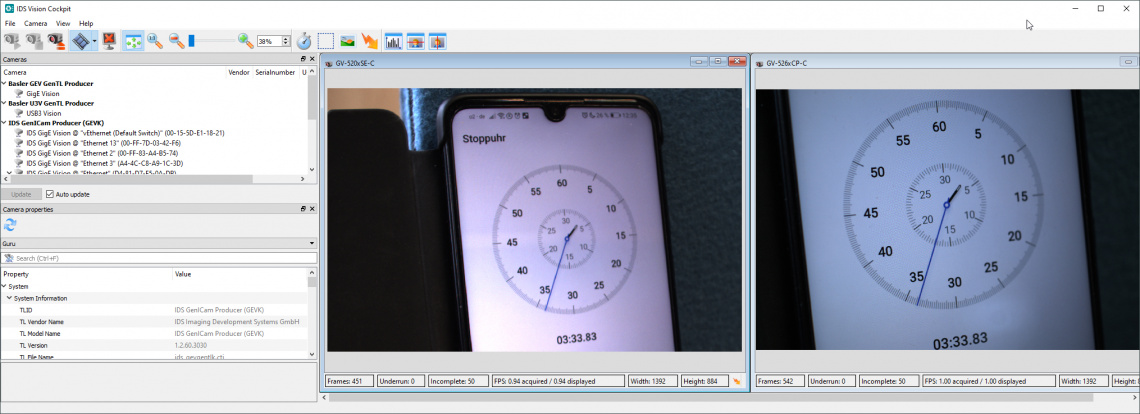
同步自由运行
顾名思义,在PTP功能启用的情况下,每台相机(主时钟相机和从时钟相机)的PPS信号会每秒生成一个。因此我们可借助PPS信号检查相机的同步状态。这一信号被设置为触发源,因此每秒钟将触发一次图像采集。除了由“相对同步”导致的几微妙的偏差,相机生成的图像时间戳应为一致。通过PPS信号实现所有相机同步自由运行的操作如下:
# image acquisition configuration for both cameras
LineSelector = Line2
LineMode = Output
LineSource = PPS
TriggerSelector = ExposureStart
TriggerMode = On
TriggerSource = Line2
# Limit bandwidth on both cameras
DeviceLinkThroughputLimit = 60000000
# Start acquisition on both cameras
Execute AcquisitionStart
同步PPS触发信号将触发相机在同一时间点进行图像采集
读取时间戳
为在应用场合中处理时间戳和图像内容,您须读取当前图像缓冲区的块数据。块数据为制造商相关的有效负载缓冲区,其存储布局通常未知,因此我们将通过节点图来读取各个元数据。为此,所有现有的元数据及其标准的节点名称将从GenTL传输至节点图,以便通过标准的API进行访问。
以下的源代码片段为您演示如何从图像缓冲区中提取时间戳。安装包也为您提供了有关块数据处理的完整源代码示例。
// Get buffer from device's datastream
const auto buffer = m_dataStream->WaitForFinishedBuffer(5000);
// check buffer for chunks
if (buffer->HasChunks())
{
// update nodemap with current chunk data
m_nodemapRemoteDevice->UpdateChunkNodes(buffer);
// Get the value of the timestamp chunk
const auto chunktimestamp = m_nodemapRemoteDevice->FindNode<peak::core::nodes::FloatNode>("ChunkTimestamp")->Value();
}
总结
当涉及图像内容的时间分配时,PTP是多相机应用场合中一个重要的基础功能,能够轻松实现相机间的相对同步,无需额外的硬件和软件支持。在许多应用场合中,相对相机同步也足以确保图像在“相同”的时间或以正确的顺序使用。相机还配备外部定时器,适用于全局同步。如果您对通过PTP同步时间存有疑问或需要了解更多信息,请联系我们。








