

 404
404
从实验室的灵巧机械手到工厂的力控装配臂,从太空探索机器人到医疗手术器械,高压放大器——这个曾被视为基础电力电子的设备——正成为前沿机器人研发与测试中重要的测试仪器。
突破极限:82毫克微型机器人的"攀爬密码"
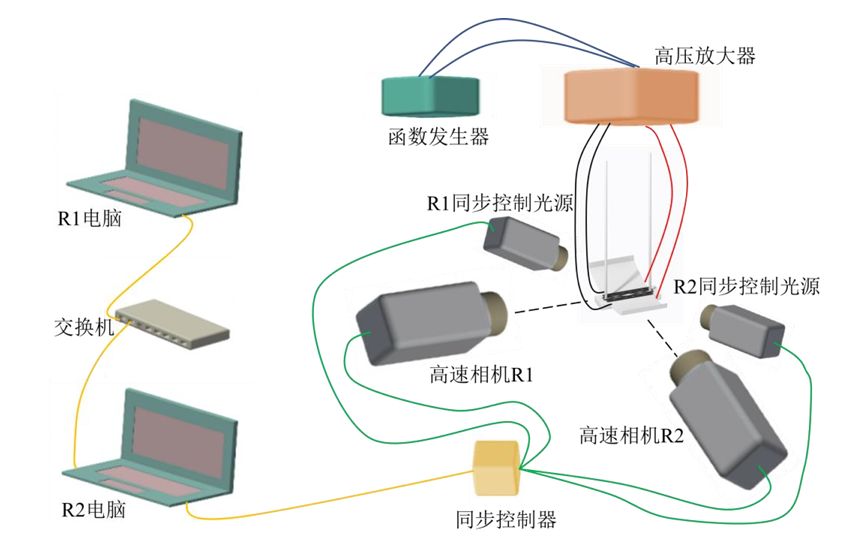
图:攀爬测试平台设备连接示意图
在机器人创新攀爬机制的研究领域,柔性驱动技术的测试一直是业界难题。近期,某高校研究团队成功研发出一款超微型柔性爬杆机器人,其整机重量仅为82毫克,却在高压放大器的精准驱动下,实现了令业界瞩目的性能指标。
在机器人攀爬速度测试实验中,研究团队采用ATA-2082高压放大器作为核心驱动设备,配合高速相机系统(3600帧/秒)进行运动捕捉。实验发现,只有当压电驱动器在380-430Hz频率范围内工作时,机器人才能产生有效的"扭转运动"实现攀爬;而在其他频率下,驱动器仅能进行无效的"上下摆动"。这一关键频率窗口的精准锁定,完全依赖于高压放大器对微弱信号的稳定放大与波形保真能力。
仿生革命:柔性表情机器人的"电力肌肉"
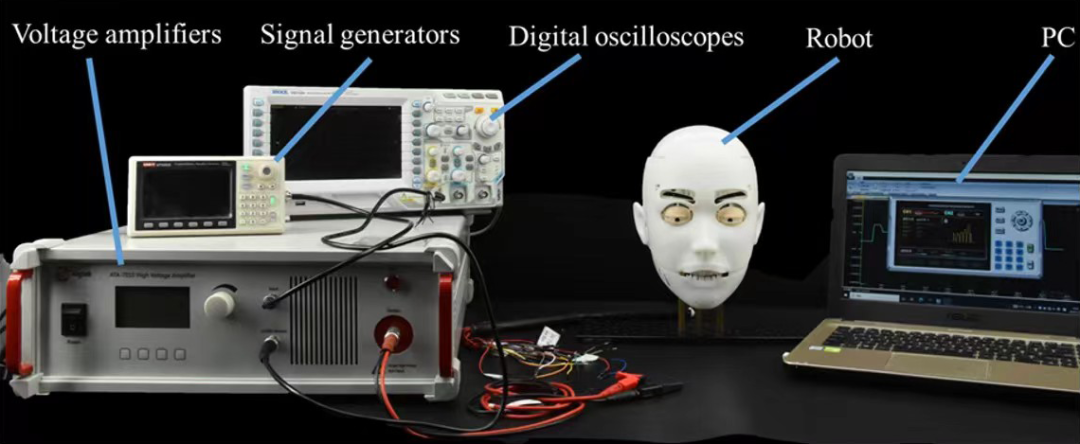
图:高压放大器ATA-7030在电致变形柔性致动器表情机器人控制实验中的应用
在一项基于智能材料的柔性器件设计研究中,科研团队采用PVC凝胶电致伸缩柔性材料与不锈钢金属网状电极层叠构成驱动核心。这种被称为"人工肌肉"的材料,在电场作用下会产生类似生物肌肉的蠕动变形——凝胶在电场下填入网状电极的孔洞,实现厚度方向的伸缩运动,断电后自动回复原状。
为了让这一仿生机制精准运作,研究团队选用了ATA-7030高压放大器搭建测试平台。信号发生器输出-10V至10V的控制信号,经高压放大器以50倍左右的增益放大至约500V高压,驱动表情机器人各模块的柔性器件运动,从而实现机器人面部表情的细腻变化。
高压仿生:蠕虫状软机器人的8千伏驱动
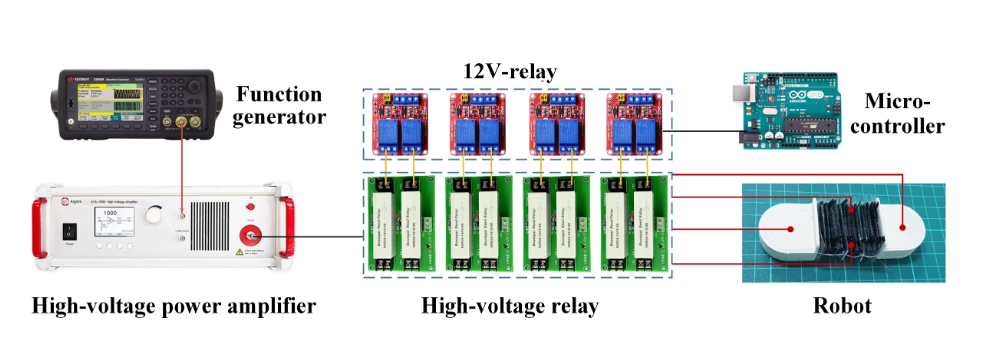
图:基于粘附控制的电液驱动器蠕虫状软机器人研究实验框图
在更极端的测试场景中,高压放大器的能力边界还在不断拓展。在一项基于粘附控制的电液驱动器蠕虫状软机器人研究中,科研团队需要驱动由柔性电极、可变形电介质囊及内部电介质液体组成的电液驱动器。
在这一测试中,ATA-7000高压放大器(最大输出40kVp-p)成为驱动系统的核心。它不仅能够放大函数发生器产生的控制信号,更通过独立控制四组执行器的电压和极性,实现软体机器人的灵活运动。配合单片机控制的继电器系统,确保了多路高压驱动的时序安全。
这类基于高压驱动技术的软体机器人在药物递送、微创手术、灾难救援等领域具有广阔应用前景。而高压放大器作为连接控制系统与执行机构的"功率桥梁",其输出的精度和稳定性直接决定了机器人运动的可靠性。
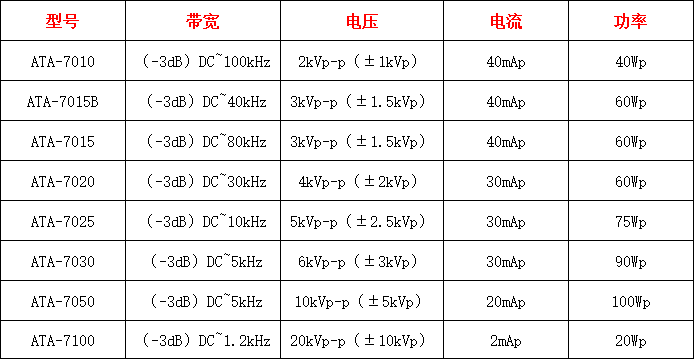
图:ATA-7000系列高压放大器指标参数
从82毫克的微型爬杆机器人到千伏级驱动的软体仿生系统,高压放大器在机器人测试领域的应用边界正在不断拓展。它不仅是简单的"功率倍增器",更是连接控制理论与物理实现的精密接口,是验证创新设计、优化系统性能、加速技术迭代的使能工具。


