

 660
660
春晚增加了很多人形机器人的节目,有人开玩笑,现在春晚的“含人量”越来越低了,未来的春晚搞不好就是一帮机器人在表演。也有人惊呼,人形机器人可能会让很多人失业,而我觉得,人形机器人要想完全替代人力,可能还需要很长时间。
舞台上的机器人确实能做很多高难度的动作,然而短短几分钟,到了幕后,机器人就不行了,剧烈的运动,让机器人热“趴”了。热量主要来自于关节内部——电机,减速器,驱动等等部件,在瞬间高功率作用下,热量无法完全散出,局部地方热量累积导致超温,直接影响到机器人的性能以及可靠性。
除了跳舞,像负重,运动,攀登等瞬态大功率的行为,对于人形机器人来说都是技术难点,因为行业在人形机器人的方案设计阶段,缺乏这方面的数据,也没有对应的性能和可靠性相关的解决方案,而这些都需要时间的积累。尤其是可靠性,性能还可以直接测试,可靠性需要大量的加速实验,而加速实验本身是否有问题,都是一个未知数,行业一般都是靠量去积累,就好比车规的器件,一个器件的寿命模型,通常需要几百台机器,数年的时间。
在工程上,寿命评估是通过实际载荷和加速老化的载荷之间的比值来计算(参考文章:功率器件的寿命评估),如果要精确评估寿命,产品在全生命过程中的实际载荷要准确,功率循环实验中的加速老化载荷也要准确。
个人认为,这恰恰是一个行业痛点。早期功率循环实验(包括相关标准),实验参数是由功率器件的开发者设计的,他们大部分都是Si-Pi的专家,但对于热了解的比较有限,而失效的根本原因是热载荷,这些实验设计和标准,未必合理【参考文章:破析AQG 324 功率循环实验(PC)失效判定标准】。
以汽车的主驱为例,行业普遍认为,45%(城市道路,高速巡航等大部分汽车工况)、60%(正常起步,温和加速)、100% (爬坡,超车,急加速)的额定电流下,主驱功率器件的主导失效机理完全一致,都是热机械疲劳失效,损伤可以线性叠加。在功率循环实验的一些标准中,一般都采用85%的电流(来自于标准),这是否真的很合理?确实值得仔细去分析分析。
器件的功耗可以分成开关损耗及导通损耗,导通损耗主要是器件的电阻导致的,从电路上,我们可以把器件的电阻分为键合线的电阻和芯片本体的电阻两部分,还是以车规 1200V IGBT为例,键合线的电阻可以认为是一个常值,大概在0.25~0.5 mΩ左右,温度变化时,这个值的变化不大,而结温为25°C时,芯片的本体电阻大约1~2 mΩ,芯片结温为150°C时,本体电阻变成了1.6~4.3mΩ,由此可见,不同电流下,导通损耗在键合线和芯片本体之间的分配,并不是不变的。1200V SiC MosFET的情况和IGBT类似,大概是芯片本体电阻略大一点,大概在2.5-6.0mΩ左右。另一种影响器件的温度分布的因素是开关损耗,IGBT的开关损耗也是随着温度升高而变大,但SiC MosFET的开关损耗会随着温度升高而变小。我们可以看到不同的电流,其失效机理并不完全一样,实际情况是相当复杂的。电流直接决定热载荷强度,大电流还会带来电迁移、电流集聚效应和键合线局部过热,这些都是可靠性考核必须可控的变量。不精确控流可能是电流不均→局部热点→引入非典型失效,寿命结果分散性极大,无法用于寿命模型。
另一方面,影响功率循环实验次数的三个核心参数为ΔTj、T_on以及Tjmax(参考文章:功率循环基础篇(二)——功率循环寿命曲线解读,转载于公众号,热数字孪生之家,作者为深藏Blue),三者共同决定疲劳损伤速率、失效模式与最终循环次数。其中
ØΔTj 决定应力幅度(主变量)
ØT_on 决定热稳态与应力分布
ØTjmax 决定高温蠕变与失效机理
ΔTj 的物理意义——结温波动幅度:ΔTj=Tjmax−Tjmin直接对应每一周的热膨胀–收缩幅度,是热机械疲劳的驱动力。ΔTj 是功率循环实验中最敏感、最核心的参数,所有加速老化的本质,都是提高ΔTj。ΔTj 增加 20~30℃,寿命可能下降一个数量级,因此功率循环实验过程中,对于Tjmax和Tjmin的精确测试,是保证功率循环实验数据有效的前提。(参考文章:关于JESD 51-14标准的理解和说明)
T_on的物理意义是导通的时长,它代表额芯片的热量在散热路径上的位置分布,热量是否充分传递到焊层、基板,以及温度分布是否均匀。T_on 过小,Nf 偏长(伪长寿),T_on 适中,Nf 稳定、可复现,T_on过长,实验效率下降。在AQG324标准中,对T_on的定义分为秒级和分钟级,我猜测该实验设计的目的是为了定义适中的T_on,但仅仅用秒级和分钟级,并不能一概而论。
下图是两个不同器件的秒级功率循环实验,加热时长均为3秒,右边的器件热时间常数比左边的小一些,因此冷却时长左边为7s,右边为5s。
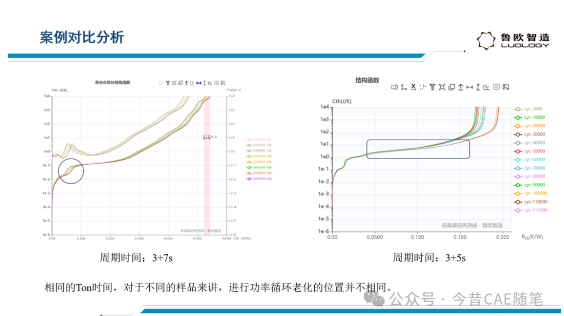
用结构函数可以看出,左边器件的失效主要发生在器件的Die Attach的位置,而右边器件的失效主要在器件下面的导热硅脂。这就说明,即使是同样的T_on,对于不同的器件,不一定都是适中的时长,老化的位置也未必一致,具体要看器件本身的热时间常数。
再次提出结构函数在功率循环实验中的重要性,结构函数是功率循环实验中解析器件热路径、定位失效位置、监测老化过程、验证加载合理性、校准寿命模型的核心手段。它将传统“只能看整体失效”的实验,提升为“可分层、可定量、可机理分析”的科学可靠性评估方法,是现代功率循环测试不可或缺的关键技术。
尤其某一些团队,主要的任务就是研究局部失效机理(比如研究不同Die Attach的工艺对寿命的影响),只有通过结构函数才能确定实验数据的有效性,大大降低实验次数,缩短实验时间。
Tjmax 决定高温蠕变、失效机理是否改变,其物理意义是每个循环的最高结温,决定材料高温强度,蠕变行为,以及是否出现过热型失效。Tjmax ≤额定最高结温失效为:热机械疲劳(焊层、键合线)机理稳定,寿命可叠加、可预测;Tjmax过高会导致芯片氧化、金属化重构、焊料软化流淌、热失控→失效机理改变,寿命不再受控。Tjmax 不只是温度上限,更是失效机理的“闸门”。它决定寿命是“正常疲劳”还是“过热烧毁”。
尽管汽车行业的可靠性实验还并不十分科学合理,基于历史数据和经验,功率循环仍然为汽车行业的可靠性做出了不可磨灭的贡献,而人形机器人行业是一个全新的行业,更关键的是我们走在了世界的最前沿,抄无可抄,基本上都是在借鉴其他行业的经验上,进行大量的复杂的正向设计,实验数据得靠自己一点一点的积累,这需要很长的时间,从今年相对于去年的进步去猜想,也许十年,也许二十年,我们的人形机器人可以真正的摆脱热烦恼,从而实现大批量应用。


