

 1105
1105
01、前言
随着端到端自动驾驶从学术探索走向规模化应用,无论是特斯拉 FSD 神经模拟器、Waymo 基于 DeepMind Genie 3 的世界模型,还是国内主流车企的数据闭环体系,均在表明仿真系统的定位已从传统测试执行工具,升级为支撑算法训练的核心数据基础设施。
尤其需要重视的是,端到端模型直接消费传感器数据进行训练,这对仿真提出了三个过去从未被充分重视的要求:
其一,光照覆盖的系统性缺口。 3D Gaussian Splatting(3DGS)已成为业界神经场景重建的主流路线之一,但其结构性局限在于:光照信息被"烘焙"进点云,无法动态调整。一条在正午采集的路段,无法在不重新出行采集的情况下还原为夜间或雨后场景——而端到端模型需要在所有光照条件下都有足够的训练样本。
其二,长尾边缘场景的物理真实性缺失。 落叶被气流卷起、雨天水花飞溅、井盖蒸汽弥漫——这些在真实道路上极低频率出现的物理现象,恰恰是传感器容易误判的高风险场景。传统仿真无法对这类流体动力学效应进行物理级建模,导致算法在此类场景下的泛化能力无法被有效验证。
其三,场景生成效率与算法迭代速度的错配。 端到端模型对场景多样性的需求呈指数级增长,但 OpenSCENARIO 场景的手工编写效率几乎没有本质改变。当算法团队每周迭代,而测试场景库每季度才能更新,验证管线就会成为整个研发体系的瓶颈。
面向上述背景的下一代自动驾驶开发范式,aiSim 6 针对端到端模型训练与验证的核心痛点,进行了非常规版本迭代,而是在神经渲染、AI 场景工作流、物理仿真三大领域进行系统性重构,并计划于2026 年上半年正式发布
02、全新aiSim 6即将发布
这不是一次常规版本迭代——aiSim 6 是针对下一代自动驾驶开发范式的系统性重构,在神经渲染、AI 原生工作流、物理仿真三个维度同步推进。
1、基于物理的动态神经渲染
3D Gaussian Splatting(3DGS)是当前神经场景重建的主流技术路线,能够将真实道路环境重建为高保真数字孪生场景,仿真效果极具说服力。
但 3DGS 有一个结构性局限:颜色与光照信息是"烘焙"进 splat 点云之中的,场景一旦采集,光照条件就被固定——原本在正午拍摄的路段,无法还原为傍晚或夜间环境。要覆盖不同光照条件下的测试用例,理论上只能反复出行采集,成本极高。
aiSim 6 的突破在于:基于自研的 PBR Splatting 技术,对 3DGS 模型可动态调整场景光照。同一条路段,白天、傍晚、夜间,任意切换。这一能力已完成 PoC 验证,将于 H1 2026 随产品正式发布。
在 aiSim Developer Client 中,对 aiSim 3D GS 场景的重光照(Relighting)效果进行演示。

(1) Color Grading:合成资产与神经场景的视觉融合
在神经场景中插入合成车辆模型,长期存在一个"穿帮"问题:合成资产与 3DGS 场景在色调、亮度、色温上往往不匹配,视觉上一眼可辨。aiSim 6 的 Color Grading 功能通过匹配合成车辆与神经场景的光照色彩基调,实现无缝的视觉融合,进一步提升合成数据的可用性。

(2)附加亮点:Gaussian Splatting Renderer for Unreal Engine 5
针对需要在 Unreal Engine 环境下开展工作的团队(如座舱 UI 的 VR 测试),aiSim 提供 GS Renderer 插件,支持将 3DGS 数字孪生场景直接导入 UE5 编辑器,即插即用。该功能已完成实现,计划 Q1 2026 发布。

2、AI驱动的场景生成
测试场景的构建效率,一直是规模化仿真的隐性瓶颈。
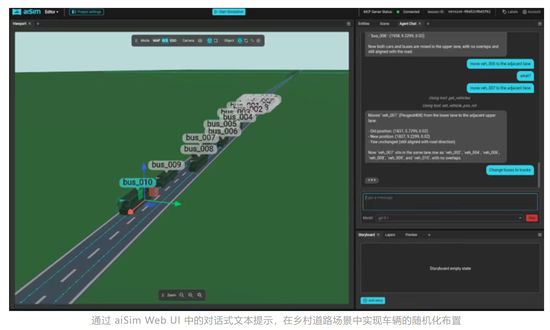
aiSim 6 通过集成 Model Context Protocol(MCP),将主流 AI 大模型(Gemini、ChatGPT、Copilot 等)直接接入仿真编辑器工作流。工程师可以通过自然语言 prompt 描述测试意图——例如"在四路交叉口随机放置 8 辆车,包含 2 辆大型货车"——系统自动生成符合 OpenSCENARIO 标准的场景文件。
这一能力的意义不只是提速。当场景生成的门槛降低,测试覆盖率的上限就会被重新定义。

MCP 的标准化接口设计同样值得关注,使AI助手能够感知仿真上下文(场景元素、地图结构),避免盲目生成。
3、Navier-Stokes 粒子仿真
Navier-Stokes 方程是描述流体运动的经典物理方程组。aiSim 6 将该方程应用于环境粒子物理仿真,可真实模拟车辆行驶气流带动的落叶运动、雨天路面溅起的水花、井盖蒸汽与交通参与者的动态交互效果,补齐边缘场景物理真实性短板,开发者预览版已完成开发。

在 aiMotive Developer Client 中对基于 Navier–Stokes 方程的粒子仿真进行的初步展示,用于演示城市环境中树叶的动态运动效果(粒子效果,非树叶模型)
4、车灯仿真:夜间 ADAS 验证的完整闭环
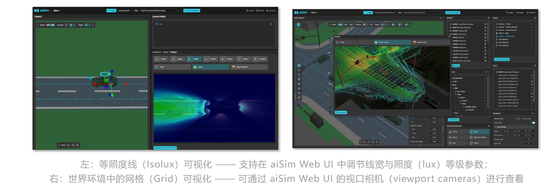
aiSim 6 进一步完善了车辆灯光系统的物理仿真能力,覆盖大灯、尾灯、转向灯等全系灯组,支持 Isolux 照度线可视化与网格化光照分布分析。核心应用场景是夜间 ADAS 功能验证,包括必须在物理级夜间光照模型下才能进行有效的合规性验证的远光辅助(High-Beam Assist)和自适应矩阵大灯功能。
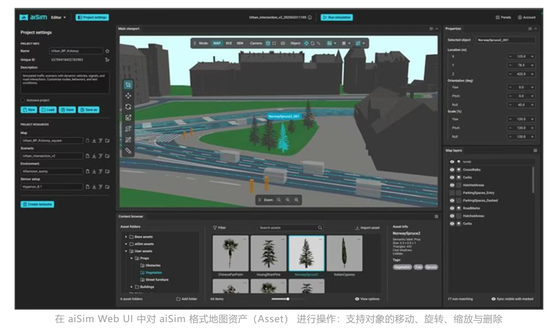
5、一体化3D 世界编辑器
aiSim 6 持续扩展内嵌于 Web UI 的 3D 世界编辑器,支持 glTF 地图导出、程序化资产布置和 OpenMATERIAL 标准集成,兼容合成场景与神经重建场景两种环境类型。对于频繁需要调整静态场景元素的工程团队,地图迭代不再依赖第三方工具,工作流大幅收敛。
03、延续高可靠工程化基础能力
aiSim 6 的所有新特性,均建立在现有版本已经验证的工程基础之上,保留并强化核心能力::
- ISO 26262 认证,覆盖至 ASIL-D(全球首款)
- 实时渲染,支持 HiL 环境接入
- 5,000+ 3D 资产,100+ 车辆模型,1,000+ 示例场景
- 20+ 基于物理的传感器模型
- 完整 ASAM 标准支持(OpenSCENARIO / OSI / OpenDRIVE / OpenCRG / OpenMATERIAL)
- 可扩展架构,支持百万级并行测试

04、展望
在端到端自动驾驶开发体系中,谁能在仿真中更真实、更高效地生成稀缺场景数据,提供更接近真实环境的渲染效果,谁就能在端到端时代掌握训练主动权。
aiSim 6 的更新脉络,与这个方向高度吻合。PBR Splatting 把 3DGS 场景从"光照固化的快照"变成了"可动态配置的训练环境";Navier-Stokes 粒子仿真把物理级环境干扰引入了合成数据链路;MCP 集成则把场景生成的速度从"工程师手动编写"提升到"自然语言即时生成"。
这三个能力叠加,勾勒出 aiSim 6 试图扮演的角色:不只是一个测试工具,而是端到端算法开发体系中的合成数据引擎。
aiSim 6,一起期待在2026 年上半年见。








