

 252
252
一、进程创建
fork函数初识
在Linux中,fork函数是非常重要的函数,它从已存在进程中创建一个新进程。新进程为子进程,而原进程为父进程。
返回值:
在子进程中返回0,父进程中返回子进程的PID,子进程创建失败返回-1。
进程调用fork,当控制转移到内核中的fork代码后,内核做:
分配新的内存块和内核数据结构给子进程。
将父进程部分数据结构内容拷贝至子进程。
添加子进程到系统进程列表当中。
fork返回,开始调度器调度。
fork之后,父子进程代码共享。例如:
运行结果如下:

这里可以看到,Before只输出了一次,而After输出了两次。其中,Before是由父进程打印的,而调用fork函数之后打印的两个After,则分别由父进程和子进程两个进程执行。也就是说,fork之前父进程独立执行,而fork之后父子两个执行流分别执行。
注意: fork之后,父进程和子进程谁先执行完全由调度器决定。
fork函数返回值
fork函数为什么要给子进程返回0,给父进程返回子进程的PID?
一个父进程可以创建多个子进程,而一个子进程只能有一个父进程。因此,对于子进程来说,父进程是不需要被标识的;而对于父进程来说,子进程是需要被标识的,因为父进程创建子进程的目的是让其执行任务的,父进程只有知道了子进程的PID才能很好的对该子进程指派任务。
为什么fork函数有两个返回值?
父进程调用fork函数后,为了创建子进程,fork函数内部将会进行一系列操作,包括创建子进程的进程控制块、创建子进程的进程地址空间、创建子进程对应的页表等等。子进程创建完毕后,操作系统还需要将子进程的进程控制块添加到系统进程列表当中,此时子进程便创建完毕了。
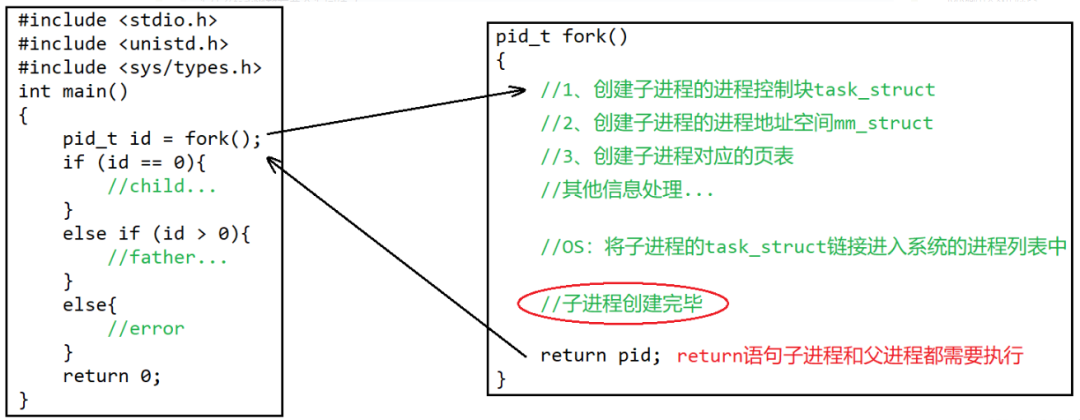
也就是说,在fork函数内部执行return语句之前,子进程就已经创建完毕了,那么之后的return语句不仅父进程需要执行,子进程也同样需要执行,这就是fork函数有两个返回值的原因。
写时拷贝
当子进程刚刚被创建时,子进程和父进程的数据和代码是共享的,即父子进程的代码和数据通过页表映射到物理内存的同一块空间。只有当父进程或子进程需要修改数据时,才将父进程的数据在内存当中拷贝一份,然后再进行修改。
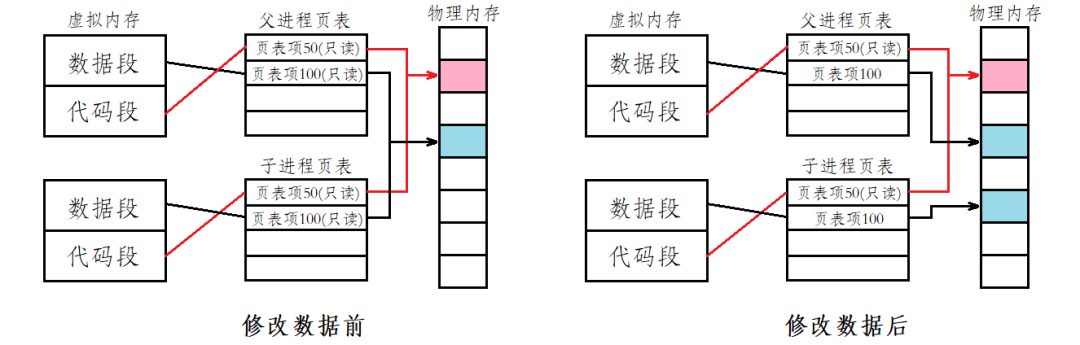
这种在需要进行数据修改时再进行拷贝的技术,称为写时拷贝技术。
1、为什么数据要进行写时拷贝?
进程具有独立性。多进程运行,需要独享各种资源,多进程运行期间互不干扰,不能让子进程的修改影响到父进程。
2、为什么不在创建子进程的时候就进行数据的拷贝?
子进程不一定会使用父进程的所有数据,并且在子进程不对数据进行写入的情况下,没有必要对数据进行拷贝,我们应该按需分配,在需要修改数据的时候再分配(延时分配),这样可以高效的使用内存空间。
3、代码会不会进行写时拷贝?
90%的情况下是不会的,但这并不代表代码不能进行写时拷贝,例如在进行进程替换的时候,则需要进行代码的写时拷贝。
fork常规用法
一个进程希望复制自己,使子进程同时执行不同的代码段。例如父进程等待客户端请求,生成子进程来处理请求。
一个进程要执行一个不同的程序。例如子进程从fork返回后,调用exec函数。
fork调用失败的原因
fork函数创建子进程也可能会失败,有以下两种情况:
系统中有太多的进程,内存空间不足,子进程创建失败。
实际用户的进程数超过了限制,子进程创建失败。
二、进程终止
进程退出场景
进程退出只有三种情况:
代码运行完毕,结果正确。
代码运行完毕,结果不正确。
代码异常终止(进程崩溃)。
进程退出码
我们都知道main函数是代码的入口,但实际上main函数只是用户级别代码的入口,main函数也是被其他函数调用的,例如在VS2013当中main函数就是被一个名为__tmainCRTStartup的函数所调用,而__tmainCRTStartup函数又是通过加载器被操作系统所调用的,也就是说main函数是间接性被操作系统所调用的。
既然main函数是间接性被操作系统所调用的,那么当main函数调用结束后就应该给操作系统返回相应的退出信息,而这个所谓的退出信息就是以退出码的形式作为main函数的返回值返回,我们一般以0表示代码成功执行完毕,以非0表示代码执行过程中出现错误,这就是为什么我们都在main函数的最后返回0的原因。
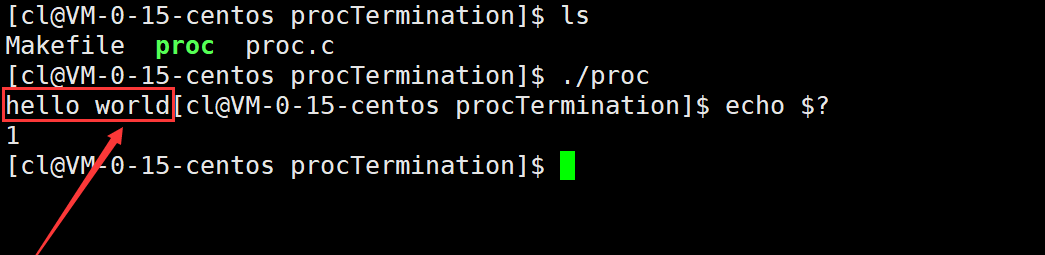
当我们的代码运行起来就变成了进程,当进程结束后main函数的返回值实际上就是该进程的进程退出码,我们可以使用echo $?命令查看最近一次进程退出的退出码信息。
例如,对于下面这个简单的代码:
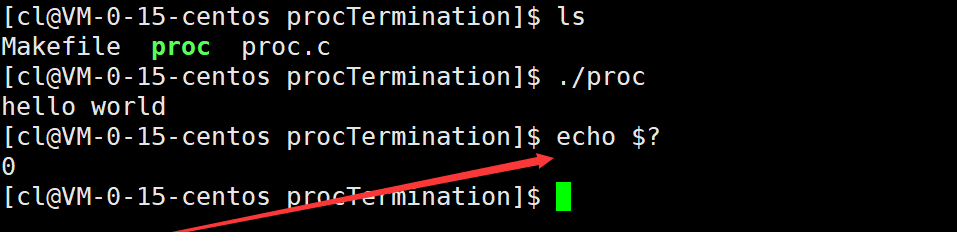
代码运行结束后,我们可以查看该进程的进程退出码。
[cl@VM-0-15-centos procTermination]$ echo $?

这时便可以确定main函数是顺利执行完毕了。
为什么以0表示代码执行成功,以非0表示代码执行错误?
因为代码执行成功只有一种情况,成功了就是成功了,而代码执行错误却有多种原因,例如内存空间不足、非法访问以及栈溢出等等,我们就可以用这些非0的数字分别表示代码执行错误的原因。
C语言当中的strerror函数可以通过错误码,获取该错误码在C语言当中对应的错误信息:

运行代码后我们就可以看到各个错误码所对应的错误信息:
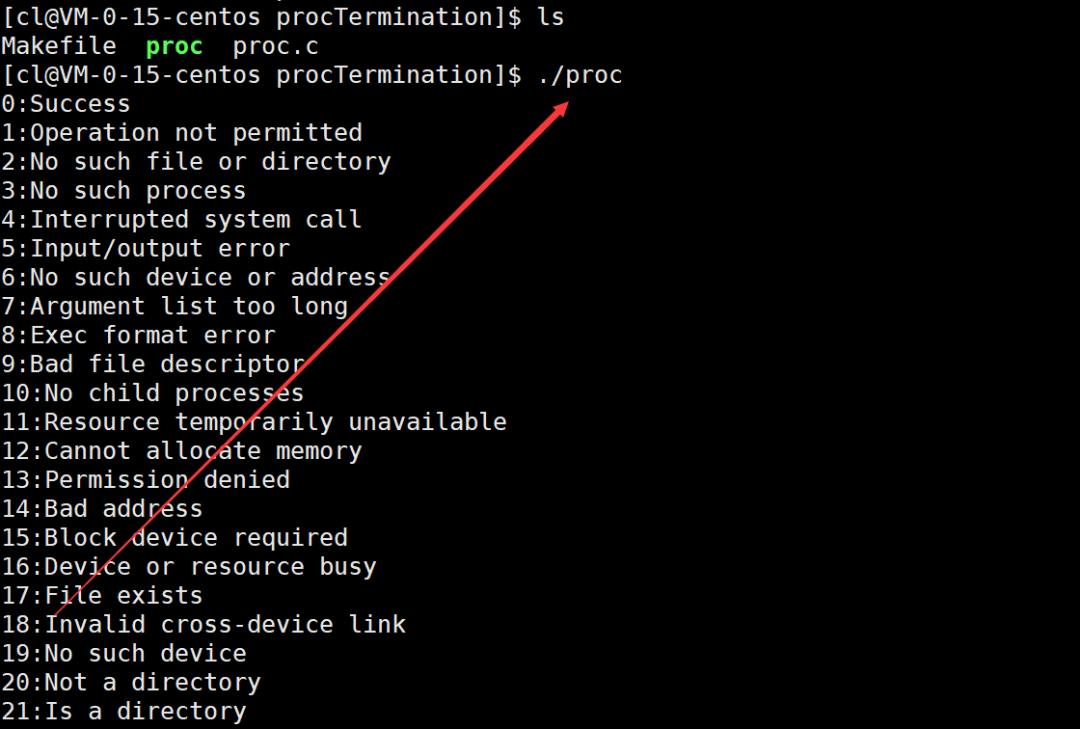
实际上Linux中的ls、pwd等命令都是可执行程序,使用这些命令后我们也可以查看其对应的退出码。
可以看到,这些命令成功执行后,其退出码也是0。

但是命令执行错误后,其退出码就是非0的数字,该数字具体代表某一错误信息。
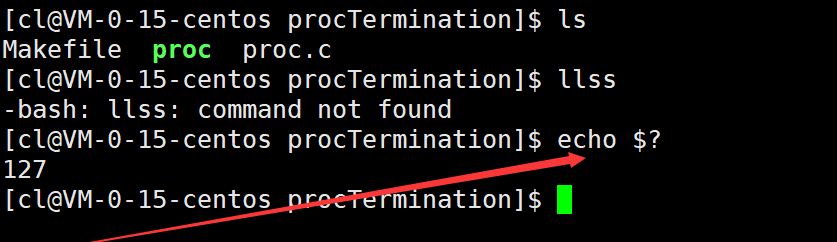
注意: 退出码都有对应的字符串含义,帮助用户确认执行失败的原因,而这些退出码具体代表什么含义是人为规定的,不同环境下相同的退出码的字符串含义可能不同。
进程正常退出
return退出
在main函数中使用return退出进程是我们常用的方法。
例如,在main函数最后使用return退出进程。
运行结果:
exit函数
使用exit函数退出进程也是我们常用的方法,exit函数可以在代码中的任何地方退出进程,并且exit函数在退出进程前会做一系列工作:
执行用户通过atexit或on_exit定义的清理函数。
关闭所有打开的流,所有的缓存数据均被写入。
调用_exit函数终止进程。
例如,以下代码中exit终止进程前会将缓冲区当中的数据输出。
运行结果:
_exit函数
使用_exit函数退出进程的方法我们并不经常使用,_exit函数也可以在代码中的任何地方退出进程,但是_exit函数会直接终止进程,并不会在退出进程前会做任何收尾工作。
例如,以下代码中使用_exit终止进程,则缓冲区当中的数据将不会被输出。

运行结果:
return、exit和_exit之间的区别与联系
return、exit和_exit之间的区别
只有在main函数当中的return才能起到退出进程的作用,子函数当中return不能退出进程,而exit函数和_exit函数在代码中的任何地方使用都可以起到退出进程的作用。
使用exit函数退出进程前,exit函数会执行用户定义的清理函数、冲刷缓冲,关闭流等操作,然后再终止进程,而_exit函数会直接终止进程,不会做任何收尾工作。

return、exit和_exit之间的联系
执行return num等同于执行exit(num),因为调用main函数运行结束后,会将main函数的返回值当做exit的参数来调用exit函数。

使用exit函数退出进程前,exit函数会先执行用户定义的清理函数、冲刷缓冲,关闭流等操作,然后再调用_exit函数终止进程。
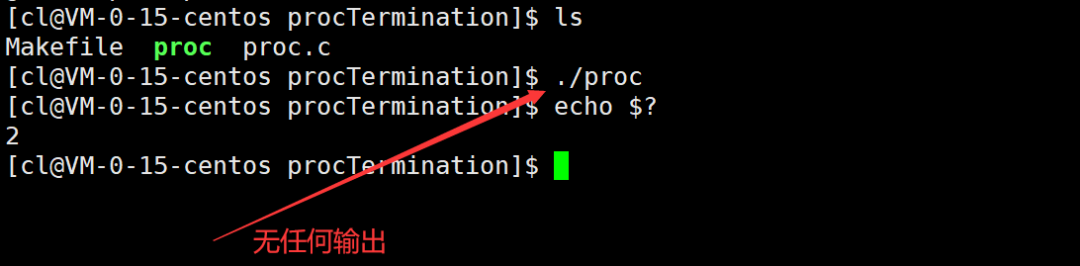
进程异常退出
情况一:向进程发生信号导致进程异常退出。
例如,在进程运行过程中向进程发生kill -9信号使得进程异常退出,或是使用Ctrl+C使得进程异常退出等。
情况二:代码错误导致进程运行时异常退出。
例如,代码当中存在野指针问题使得进程运行时异常退出,或是出现除0的情况使得进程运行时异常退出等。
三、进程等待
进程等待的必要性
子进程退出,父进程如果不读取子进程的退出信息,子进程就会变成僵尸进程,进而造成内存泄漏。
进程一旦变成僵尸进程,那么就算是kill -9命令也无法将其杀死,因为谁也无法杀死一个已经死去的进程。
对于一个进程来说,最关心自己的就是其父进程,因为父进程需要知道自己派给子进程的任务完成的如何。
父进程需要通过进程等待的方式,回收子进程资源,获取子进程的退出信息。
获取子进程status
下面进程等待所使用的两个函数wait和waitpid,都有一个status参数,该参数是一个输出型参数,由操作系统进行填充。
如果对status参数传入NULL,表示不关心子进程的退出状态信息。否则,操作系统会通过该参数,将子进程的退出信息反馈给父进程。
status是一个整型变量,但status不能简单的当作整型来看待,status的不同比特位所代表的信息不同,具体细节如下(只研究status低16比特位):

在status的低16比特位当中,高8位表示进程的退出状态,即退出码。进程若是被信号所杀,则低7位表示终止信号,而第8位比特位是core dump标志。
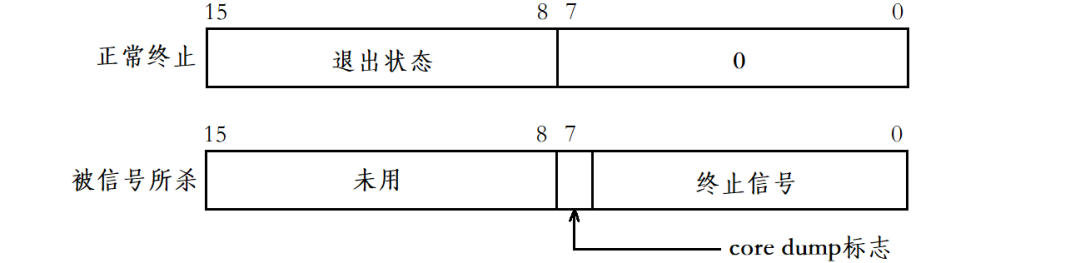
我们通过一系列位操作,就可以根据status得到进程的退出码和退出信号。
exitCode = (status >> 8) & 0xFF; //退出码
exitSignal = status & 0x7F; //退出信号
对于此,系统当中提供了两个宏来获取退出码和退出信号。
WIFEXITED(status):用于查看进程是否是正常退出,本质是检查是否收到信号。
WEXITSTATUS(status):用于获取进程的退出码。
exitNormal = WIFEXITED(status); //是否正常退出
exitCode = WEXITSTATUS(status); //获取退出码
需要注意的是,当一个进程非正常退出时,说明该进程是被信号所杀,那么该进程的退出码也就没有意义了。
进程等待的方法
wait方法
函数原型:pid_t wait(int* status);
作用:等待任意子进程。
返回值:等待成功返回被等待进程的pid,等待失败返回-1。
参数:输出型参数,获取子进程的退出状态,不关心可设置为NULL。
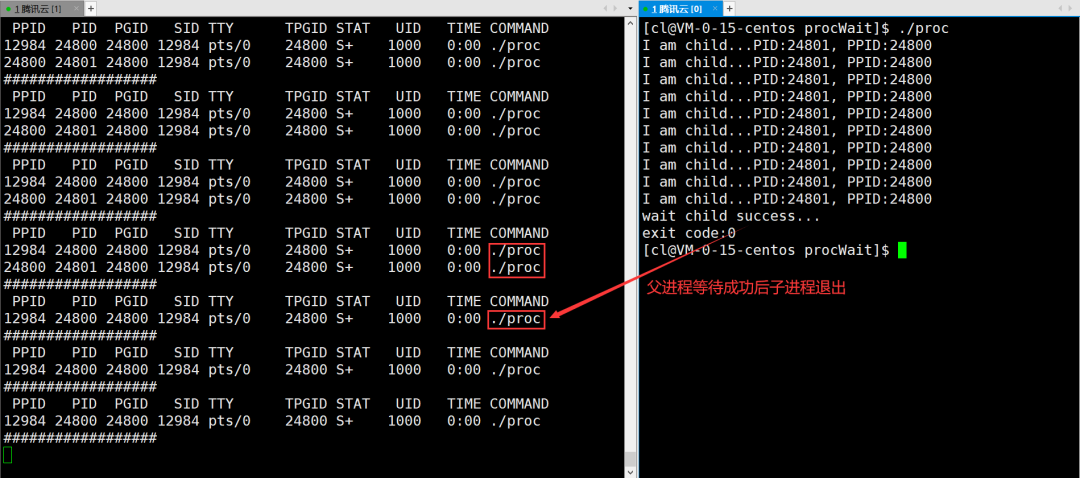
例如,创建子进程后,父进程可使用wait函数一直等待子进程,直到子进程退出后读取子进程的退出信息。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h>
#include <sys/types.h>
int main()
{
pid_t id = fork();
if(id == 0){
//child
int count = 10;
while(count--){
printf("I am child...PID:%d, PPID:%dn", getpid(), getppid());
sleep(1);
}
exit(0);
}
//father
int status = 0;
pid_t ret = wait(&status);
if(ret > 0){
//wait success
printf("wait child success...n");
if(WIFEXITED(status)){
//exit normal
printf("exit code:%dn", WEXITSTATUS(status));
}
}
sleep(3);
return 0;
}
我们可以使用以下监控脚本对进程进行实时监控:
[cl@VM-0-15-centos procWait]$ while :; do ps axj | head -1 && ps axj | grep proc | grep -v grep;echo "######################";sleep 1;done
这时我们可以看到,当子进程退出后,父进程读取了子进程的退出信息,子进程也就不会变成僵尸进程了。
waitpid方法
函数原型:pid_t waitpid(pid_t pid, int* status, int options);
作用:等待指定子进程或任意子进程。
返回值:
1、等待成功返回被等待进程的pid。
2、如果设置了选项WNOHANG,而调用中waitpid发现没有已退出的子进程可收集,则返回0。
3、如果调用中出错,则返回-1,这时errno会被设置成相应的值以指示错误所在。
参数:
1、pid:待等待子进程的pid,若设置为-1,则等待任意子进程。
2、status:输出型参数,获取子进程的退出状态,不关心可设置为NULL。
3、options:当设置为WNOHANG时,若等待的子进程没有结束,则waitpid函数直接返回0,不予以等待。若正常结束,则返回该子进程的pid。
例如,创建子进程后,父进程可使用waitpid函数一直等待子进程(此时将waitpid的第三个参数设置为0),直到子进程退出后读取子进程的退出信息。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h>
#include <sys/types.h>
int main()
{
pid_t id = fork();
if (id == 0){
//child
int count = 10;
while (count--){
printf("I am child...PID:%d, PPID:%dn", getpid(), getppid());
sleep(1);
}
exit(0);
}
//father
int status = 0;
pid_t ret = waitpid(id, &status, 0);
if (ret >= 0){
//wait success
printf("wait child success...n");
if (WIFEXITED(status)){
//exit normal
printf("exit code:%dn", WEXITSTATUS(status));
}
else{
//signal killed
printf("killed by siganl %dn", status & 0x7F);
}
}
sleep(3);
return 0;
}
在父进程运行过程中,我们可以尝试使用kill -9命令将子进程杀死,这时父进程也能等待子进程成功。
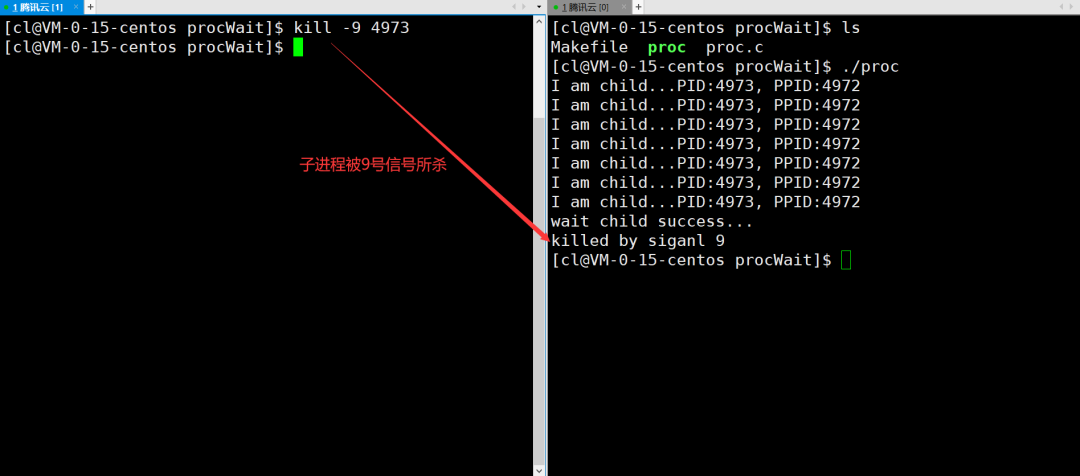
注意: 被信号杀死而退出的进程,其退出码将没有意义。
多进程创建以及等待的代码模型
上面演示的都是父进程创建以及等待一个子进程的例子,实际上我们还可以同时创建多个子进程,然后让父进程依次等待子进程退出,这叫做多进程创建以及等待的代码模型。
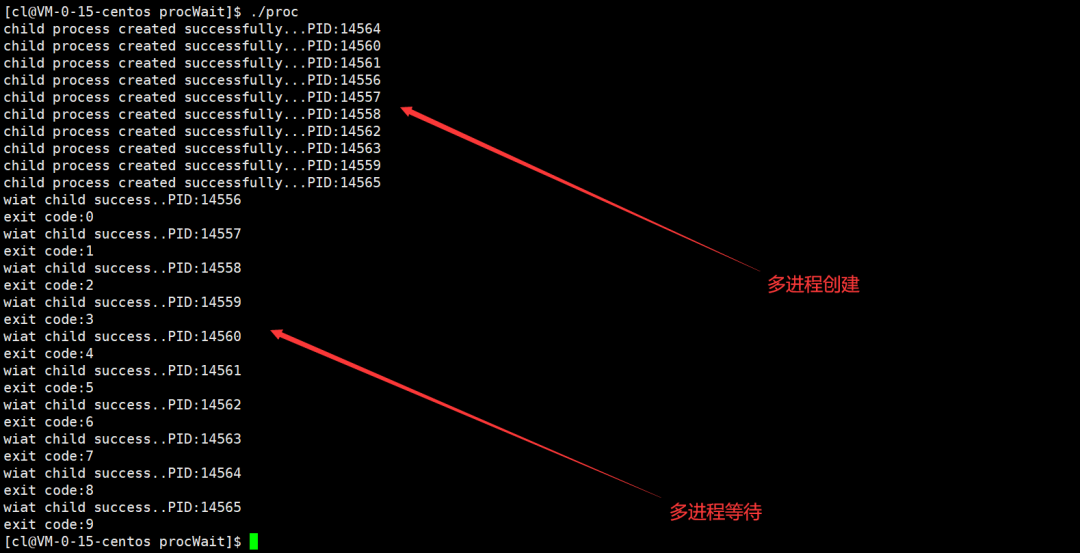
例如,以下代码中同时创建了10个子进程,同时将子进程的pid放入到ids数组当中,并将这10个子进程退出时的退出码设置为该子进程pid在数组ids中的下标,之后父进程再使用waitpid函数指定等待这10个子进程。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
int main()
{
pid_t ids[10];
for (int i = 0; i < 10; i++){
pid_t id = fork();
if (id == 0){
//child
printf("child process created successfully...PID:%dn", getpid());
sleep(3);
exit(i); //将子进程的退出码设置为该子进程PID在数组ids中的下标
}
//father
ids[i] = id;
}
for (int i = 0; i < 10; i++){
int status = 0;
pid_t ret = waitpid(ids[i], &status, 0);
if (ret >= 0){
//wait child success
printf("wiat child success..PID:%dn", ids[i]);
if (WIFEXITED(status)){
//exit normal
printf("exit code:%dn", WEXITSTATUS(status));
}
else{
//signal killed
printf("killed by signal %dn", status & 0x7F);
}
}
}
return 0;
}
运行代码,这时我们便可以看到父进程同时创建多个子进程,当子进程退出后,父进程再依次读取这些子进程的退出信息。
基于非阻塞接口的轮询检测方案
上述所给例子中,当子进程未退出时,父进程都在一直等待子进程退出,在等待期间,父进程不能做任何事情,这种等待叫做阻塞等待。
实际上我们可以让父进程不要一直等待子进程退出,而是当子进程未退出时父进程可以做一些自己的事情,当子进程退出时再读取子进程的退出信息,即非阻塞等待。
做法很简单,向waitpid函数的第三个参数potions传入WNOHANG,这样一来,等待的子进程若是没有结束,那么waitpid函数将直接返回0,不予以等待。而等待的子进程若是正常结束,则返回该子进程的pid。
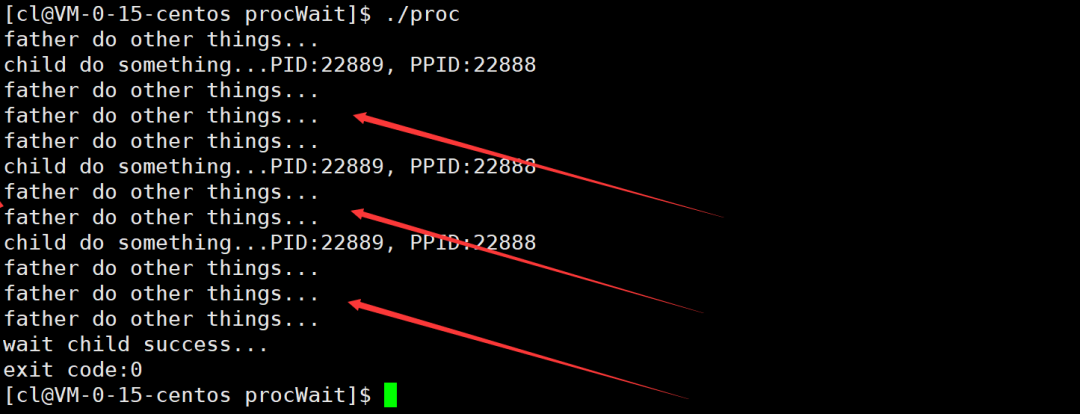
例如,父进程可以隔一段时间调用一次waitpid函数,若是等待的子进程尚未退出,则父进程可以先去做一些其他事,过一段时间再调用waitpid函数读取子进程的退出信息。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
int main()
{
pid_t id = fork();
if (id == 0){
//child
int count = 3;
while (count--){
printf("child do something...PID:%d, PPID:%dn", getpid(), getppid());
sleep(3);
}
exit(0);
}
//father
while (1){
int status = 0;
pid_t ret = waitpid(id, &status, WNOHANG);
if (ret > 0){
printf("wait child success...n");
printf("exit code:%dn", WEXITSTATUS(status));
break;
}
else if (ret == 0){
printf("father do other things...n");
sleep(1);
}
else{
printf("waitpid error...n");
break;
}
}
return 0;
}
运行结果就是,父进程每隔一段时间就去查看子进程是否退出,若未退出,则父进程先去忙自己的事情,过一段时间再来查看,直到子进程退出后读取子进程的退出信息。
四、进程程序替换
替换原理
用fork创建子进程后,子进程执行的是和父进程相同的程序(但有可能执行不同的代码分支),若想让子进程执行另一个程序,往往需要调用一种exec函数。
当进程调用一种exec函数时,该进程的用户空间代码和数据完全被新程序替换,并从新程序的启动例程开始执行。

当进行进程程序替换时,有没有创建新的进程?
进程程序替换之后,该进程对应的PCB、进程地址空间以及页表等数据结构都没有发生改变,只是进程在物理内存当中的数据和代码发生了改变,所以并没有创建新的进程,而且进程程序替换前后该进程的pid并没有改变。
子进程进行进程程序替换后,会影响父进程的代码和数据吗?
子进程刚被创建时,与父进程共享代码和数据,但当子进程需要进行进程程序替换时,也就意味着子进程需要对其数据和代码进行写入操作,这时便需要将父子进程共享的代码和数据进行写时拷贝,此后父子进程的代码和数据也就分离了,因此子进程进行程序替换后不会影响父进程的代码和数据。
替换函数
替换函数有六种以exec开头的函数,它们统称为exec函数:
一、int execl(const char *path, const char *arg, ...);
第一个参数是要执行程序的路径,第二个参数是可变参数列表,表示你要如何执行这个程序,并以NULL结尾。
例如,要执行的是ls程序。
execl("/usr/bin/ls", "ls", "-a", "-i", "-l", NULL);
二、int execlp(const char *file, const char *arg, ...);
第一个参数是要执行程序的名字,第二个参数是可变参数列表,表示你要如何执行这个程序,并以NULL结尾。
例如,要执行的是ls程序。
execlp("ls", "ls", "-a", "-i", "-l", NULL);
三、int execle(const char *path, const char *arg, ..., char *const envp[]);
第一个参数是要执行程序的路径,第二个参数是可变参数列表,表示你要如何执行这个程序,并以NULL结尾,第三个参数是你自己设置的环境变量。
例如,你设置了MYVAL环境变量,在mycmd程序内部就可以使用该环境变量。
char* myenvp[] = { "MYVAL=2021", NULL };
execle("./mycmd", "mycmd", NULL, myenvp);
四、int execv(const char *path, char *const argv[]);
第一个参数是要执行程序的路径,第二个参数是一个指针数组,数组当中的内容表示你要如何执行这个程序,数组以NULL结尾。
例如,要执行的是ls程序。
char* myargv[] = { "ls", "-a", "-i", "-l", NULL };
execv("/usr/bin/ls", myargv);
五、int execvp(const char *file, char *const argv[]);
第一个参数是要执行程序的名字,第二个参数是一个指针数组,数组当中的内容表示你要如何执行这个程序,数组以NULL结尾。
例如,要执行的是ls程序。
char* myargv[] = { "ls", "-a", "-i", "-l", NULL };
execvp("ls", myargv);
六、int execve(const char *path, char *const argv[], char *const envp[]);
第一个参数是要执行程序的路径,第二个参数是一个指针数组,数组当中的内容表示你要如何执行这个程序,数组以NULL结尾,第三个参数是你自己设置的环境变量。
例如,你设置了MYVAL环境变量,在mycmd程序内部就可以使用该环境变量。
char* myargv[] = { "mycmd", NULL };
char* myenvp[] = { "MYVAL=2021", NULL };
execve("./mycmd", myargv, myenvp);
函数解释
这些函数如果调用成功,则加载指定的程序并从启动代码开始执行,不再返回。
如果调用出错,则返回-1。
也就是说,exec系列函数只要返回了,就意味着调用失败。
命名理解
这六个exec系列函数的函数名都以exec开头,其后缀的含义如下:
l(list):表示参数采用列表的形式,一一列出。
v(vector):表示参数采用数组的形式。
p(path):表示能自动搜索环境变量PATH,进行程序查找。
e(env):表示可以传入自己设置的环境变量。

事实上,只有execve才是真正的系统调用,其它五个函数最终都是调用的execve,所以execve在man手册的第2节,而其它五个函数在man手册的第3节,也就是说其他五个函数实际上是对系统调用execve进行了封装,以满足不同用户的不同调用场景的。
下图为exec系列函数族之间的关系:

做一个简易的shell
shell也就是命令行解释器,其运行原理就是:当有命令需要执行时,shell创建子进程,让子进程执行命令,而shell只需等待子进程退出即可。

其实shell需要执行的逻辑非常简单,其只需循环执行以下步骤:
获取命令行。
解析命令行。
创建子进程。
替换子进程。
等待子进程退出。
其中,创建子进程使用fork函数,替换子进程使用exec系列函数,等待子进程使用wait或者waitpid函数。
于是我们可以很容易实现一个简易的shell,代码如下:
#include <stdio.h>
#include <pwd.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/wait.h>
#define LEN 1024 //命令最大长度
#define NUM 32 //命令拆分后的最大个数
int main()
{
char cmd[LEN]; //存储命令
char* myargv[NUM]; //存储命令拆分后的结果
char hostname[32]; //主机名
char pwd[128]; //当前目录
while (1){
//获取命令提示信息
struct passwd* pass = getpwuid(getuid());
gethostname(hostname, sizeof(hostname)-1);
getcwd(pwd, sizeof(pwd)-1);
int len = strlen(pwd);
char* p = pwd + len - 1;
while (*p != '/'){
p--;
}
p++;
//打印命令提示信息
printf("[%s@%s %s]$ ", pass->pw_name, hostname, p);
//读取命令
fgets(cmd, LEN, stdin);
cmd[strlen(cmd) - 1] = '�';
//拆分命令
myargv[0] = strtok(cmd, " ");
int i = 1;
while (myargv[i] = strtok(NULL, " ")){
i++;
}
pid_t id = fork(); //创建子进程执行命令
if (id == 0){
//child
execvp(myargv[0], myargv); //child进行程序替换
exit(1); //替换失败的退出码设置为1
}
//shell
int status = 0;
pid_t ret = waitpid(id, &status, 0); //shell等待child退出
if (ret > 0){
printf("exit code:%dn", WEXITSTATUS(status)); //打印child的退出码
}
}
return 0;
}
效果展示:
说明:
当执行./myshell命令后,便是我们自己实现的shell在进行命令行解释,我们自己实现的shell在子进程退出后都打印了子进程的退出码,我们可以根据这一点来区分我们当前使用的是Linux操作系统的shell还是我们自己实现的shell。





