

 1427
1427
车载AI芯片作为自动驾驶汽车的“大脑”,承担着最艰巨复杂的任务。然而目前车载芯片市场玩家众多,芯片架构也纷繁复杂。从传统汽车到自动驾驶,车载芯片发什了什么变化?本文将带你了解车载AI芯片的发展趋势与参数分析。
车载芯片发展趋势
早期,汽车通常以分布式ECU架构为主,每个模块都拥有单独的ECU(电子控制单元)。随着汽车电子的发展,越来越多的复杂功能被集成到汽车上,区域中心化架构与整车中心化架构的比例逐年提高。目前,整车中心化架构已经成为智能车的主流架构与发展趋势,对域控制芯片的要求也在提升。
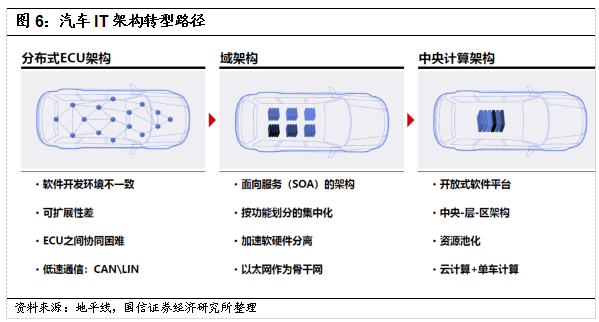
汽车架构对比 图源:国信证券
在智能驾驶汽车普及之前,传统汽车通常采用MCU作为控制芯片。传统MCU整合了CPU、内存、多个I/O接口等模块,相当于芯片级计算机。在中心化架构中,各个ECU会在收集信息后统一上传至MCU进行处理和运算。汽车集成的模块越多,功能越复杂,对MCU的要求也就越高,MCU也逐渐从开始的8位逐渐变为32为,来满足汽车日益增长的算力需求。
然而在自动驾驶时代到来后,汽车对芯片算力的需求暴涨。行业报告显示,L2级别的自动驾驶汽车会用到6个传感器,L5阶段预计单车携带的传感器数量将达到32个。业内人士称当自动驾驶达到L3级别时算力需求超过250TOPS,L4级别将达到500TOPS,L5级别或将超过1000TOPS。由于要完成大量运算,域控制器一般都要匹配一个核心运算力强的处理器,能够提供自动驾驶不同级别算力的支持,以CPU为核心的MCU已经无法满足爆棚的算力需求,主控芯片逐渐向SoC异构芯片方向发展。其中TOPS(万亿次每秒)算计级别的AI芯片成为厂商追捧的对象。
现阶段用于汽车决策控制的AI芯片,数据、算力和算法是三大要素,CPU配合加速芯片的模式成为典型的AI部署方案。常见的AI加速芯片包括GPU、FPGA、ASIC以及多种类脑芯片架构(NPU)。目前车载主控以AI芯片(带有AI计算能力的SoC)为主,常由 CPU+GPU+DSP+NPU+各种外设接口、存储类型等电子元件组成。对比传统MCU,AI芯片中多了GPU与NPU模块。实际上完成自动驾驶相关计算的主要为ALU(逻辑运算单元),其他各个模块的存在都是为了保证指令能够有序执行。由于功耗与芯片频率上限的限制,CPU系统在进行深度学习计算时上限较低。对比CPU十百级的并行处理单元,GPU有上万级的并行处理单元,NPU会有百万级的并行计算单元,其算法运行速度要远超以CPU为主的MCU。

目前几家车载AI芯片厂商采用的芯片架构并不相同。
英伟达和特斯拉FSD采用CPU+GPU+ASIC的设计路线。英伟达Orin芯片以GPU为计算核心,主要有4个模块:CPU、GPU、DLA(Deep Learning Accelerator)和PVA(Programmable Vision Accelerator)。特斯拉FSD以NPU为计算核心,由CPU、GPU和NPU(Neural Processing Unit)组成。DLA与PVA是两个专用ASIC,DLA用于推理 ,PVA用于加速传统视觉算法。
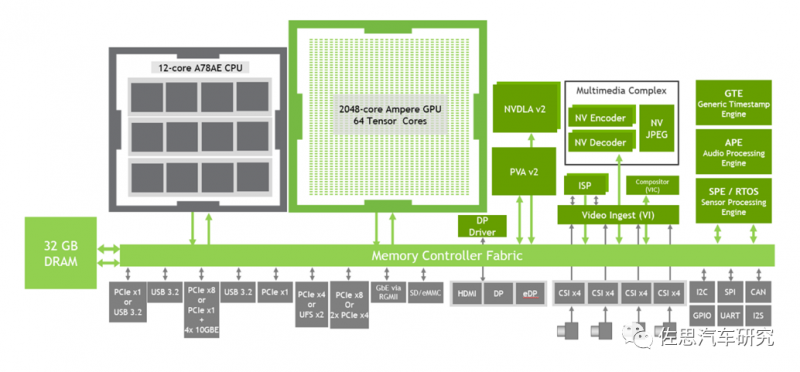
英伟达Orin芯片架构 来源:佐思汽车
前段时间上市的Mobileye和国产芯片厂商地平线采用CPU+ASIC架构。Mobileye的EyeQ5芯片由CPU、CVP(Computer Vision Processors)、DLA(Deep Learning Accelerator)和MA(Multithreaded Accelerator)组成。CVP是针对很多传统计算机视觉算法设计的ASIC。地平线则自研专用ASIC芯片BPU(Brain Processing Unit),目前已经形成三种不同架构模型,分别是高斯架构、伯努利架构与贝叶斯架构。

地平线BPU路线图 图源:地平线
无论各家采用的架构如何变化,注重提高芯片计算性能依旧是核心目的。未来随着自动驾驶算法的优化与固定,所有架构都将不断趋同。
车载AI芯片之争,参数不只有算力
汽车自动驾驶体验的的好坏,与ADAS车载系统性能息息相关。目前ADAS性行主要以“硬件预埋,算法迭代,算力均衡”体现。硬件的性能主要通过算力这题途径体现。
自动驾驶需要依赖大量车载传感器对外部环境的探测与采集,这些数据会被上传至中央处理器进行处理,用来判断车辆行驶的下一阶段该采取什么操作。整个过程需要在一瞬间完成,延时必须要控制在毫秒甚至微秒级别,才能保证自动驾驶的行驶安全。
然而做到快速反应并不容易,这对处理器的要求非常高。前文提到,自动驾驶时代,车辆搭载了大量传感器,更多的车载摄像头+激光雷达的组合每秒将产生海量数据,更大的算力也意味着芯片可以更快的完成数据处理。
除了算力外,车载芯片往往运行在复杂的环境中,所以对算力的利用率也是必须关注的参数。由于AI算法需要与内存进行大量数据交换,所以目前制约算力运用率的主要因素是内存与带宽。
相应的,算力损耗意味着芯片耗能增加,发热量增加,所以能效比也是车载AI芯片的重要参数之一。尤其是芯片在高性能模式下,芯片过热会触及芯片功耗墙并降频,这对于车载芯片来说将是个严重问题。而能效比主要取决于芯片架构的设计,如何提高数据交换带宽与内存效率是芯片厂商的重要课题。
在感知层与决策层、执行层的数据交换方面,图像接口也直接影响着车载系统性能。目前上车的摄像头、毫米波雷达、超声波雷达、激光雷达以及导航模块都需要特定接口与系统建立连接。据媒体统计,目前摄像头接口主要有MIPI SI-2、LVDS、GMSL、FPDLink等,超声波雷达使用LIN总线连接,激光雷达则使用Ethernet接口。众多接口都需要车载AI芯片的支持。在AI芯片扩展方面,未来自动驾驶对AI芯片有更高要求时,支持PCIE接口来连接更多计算单元也十分重要。
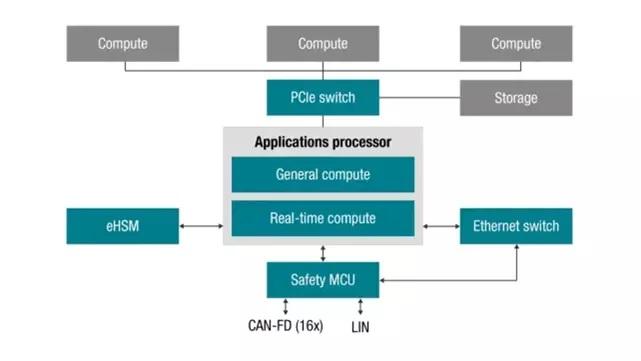
AI芯片扩展 图源:大大通
最后,芯片的安全性与稳定性是一切性能的前提。目前芯片标准大致有以下四类,军工级、汽车级、工业级以及民用级(商用级)。车载AI芯片属于车规级芯片,标准要高于工业级和民用级芯片,仅次于军工级芯片。其制作要求远高于工业级芯片和民用级芯片,因此车规级芯片的安全性与稳定性通常高于普通芯片很多。
总结
一个优秀的车载AI芯片应该是一个“全能战士”,它即有强大的算力,又具有优秀的反应速度,还有灵活、全面、便捷开发以及安全可靠等特点。无论目前AI芯片架构如何调整,性能将会是其追求的唯一目的。
参考资料
自动驾驶主流芯片及平台架构https://www.wpgdadatong.com/blog/detail/45022
混搭出奇迹,自动驾驶AI芯片上演架构之争http://news.eeworld.com.cn/qrs/ic548076.html
英伟达Orin芯片详解https://www.eet-china.com/mp/a93121.html
自动驾驶域控芯片内部架构与性能影响https://www.51cto.com/article/700889.html
ADS-NPU芯片架构设计的五大挑战https://www.sohu.com/a/564185796_121136454
来源: 与非网,作者: 刘浩然,原文链接: https://www.eefocus.com/article/529033.html



.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)

