

 797
797
在工业数字化转型的浪潮中,数字孪生已成为连接物理世界与数字世界的核心桥梁。然而,当业界普遍将数字孪生视为三维建模与数据可视化的工具时,一场更深层的技术革命正在酝酿——从“静态镜像”走向“主动认知”。智汇云舟通过自研的“孪舟”引擎和空间语义大模型,重新定义了工业系统智能化的路径。本文将从概念本质、技术范式到智能层级,深度剖析数字孪生工业系统与视频孪生工业系统平台的区别。

一、概念本质:几何复刻与时空统一
传统数字孪生的“静态镜像”困境
传统数字孪生工业系统源于CAD模型和传感器数据的静态叠加,其核心逻辑是通过三维建模在虚拟空间复现物理实体的几何结构。这类系统依赖预设的传感器布点,通过历史数据和离线仿真实现状态监测与故障诊断。然而,其致命缺陷在于“静态建模与动态现实的脱节”:虚拟场景的更新频率往往在秒级甚至分钟级,难以与生产现场的实时变化保持同步。当设备位移、人员闯入或突发异常时,数字模型与物理实体的“孪生关系”便出现断裂。
视频孪生的“时空统一”革命
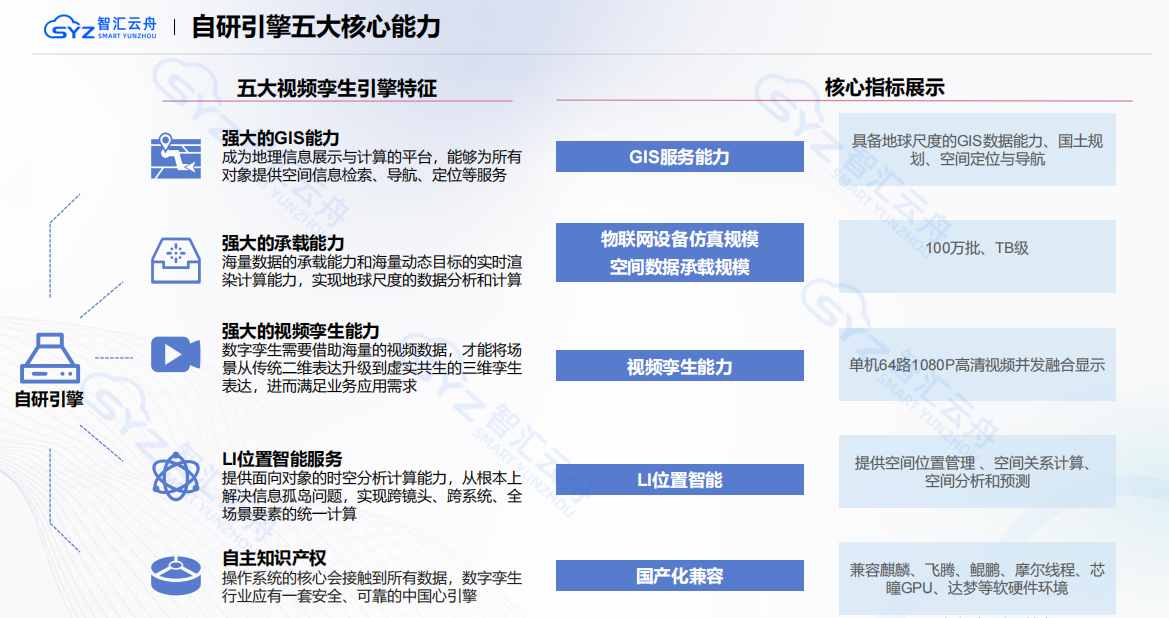
智汇云舟研发视频孪生技术,率先提出了“3DGIS+Model+(Video+AI+IOT)+LI”的技术体系。视频孪生的本质在于以视频为时空基准,将经度、纬度、海拔作为统一坐标,实现实时监控视频流与GIS地理信息、物联网数据的像素级融合。这意味着,工业系统中的每一台设备、每一条产线、每一个移动目标,不仅在三维模型中有几何表达,更在视频流中拥有实时动态的“视觉化身”。
二者的根本差异在于:传统数字孪生构建的是“几何副本”,而视频孪生打造的是“时空镜像”。前者回答“设备长什么样”,后者回答“设备此刻在做什么、与谁互动”。
二、技术范式:数据拼接与智能融合
传统架构的“烟囱式”集成
传统数字孪生平台通常采用分层架构,将建模工具、仿真引擎、数据中台进行拼接。数据来源包括CAD模型、SCADA系统的传感器数值、MES系统的生产日志,但这些数据在时空维度上是割裂的——温度传感器报告“设备A温度过高”,但管理者无法在监控画面中即时定位设备A的具体位置和周围环境。这种“数据烟囱”导致工业系统的态势感知能力严重受限。
视频孪生的“视算一体”引擎
智汇云舟自研的“孪舟”引擎实现了技术范式的跨越。该引擎是全球首个兼具游戏级渲染效果与地球尺度大场景空间计算能力的纯国产引擎。其核心技术突破体现在三个方面:
视频3D矫正与拼接:通过独有的Pixel2Geo算法,将2D视频像素精准映射到3D空间坐标,实现多路视频的无缝融合与动态重构。
毫秒级时空同步:以视频流为时间轴基准,将IoT数据、AI识别结果实时注入三维场景,虚拟世界与物理实体的延迟控制在毫秒级。
LI位置智能服务:在统一时空框架下,为数字孪生提供位置智能分析能力,使系统能够回答“谁在哪、从哪来、到哪去”的空间关系问题。
这一技术范式使工业系统从“数据可视化”跃升为“空间智能体”。管理者看到的不仅是三维模型,而是“活”的孪生场景——AGV小车的实时轨迹、机械臂的作业姿态、人员的空间分布,全部在统一时空坐标系中动态呈现。
三、智能层级:被动展示与主动认知
传统数字孪生的“后知后觉”
传统工业数字孪生系统的智能主要体现在仿真优化和故障诊断层面。系统通过积累历史数据,建立设备健康模型,预测潜在故障。但这种智能是“离线”和“后验”的——只有当传感器数据触发阈值,或仿真模型发现异常趋势时,系统才会告警。对于正在发生的突发事件,如人员违规闯入危险区、物料掉落堵塞产线,传统系统往往只能事后回放视频,无法实时干预。
空间语义大模型的“先知先觉”
真正拉开差距的,是智汇云舟引入的空间语义大模型。如果说视频孪生解决了“看得清”的问题,那么空间语义大模型则实现了“看得懂”的飞跃。
空间语义大模型的核心价值在于赋予数字世界认知能力。传统AI识别只能给出“画面中有人”的标签,而空间语义大模型能够理解“这里是A车间的3号危险区,有人未佩戴安全帽闯入,可能触发连锁风险”。这种认知能力建立在三个层面:
空间关系理解:模型不仅识别物体,更理解物体之间的空间语义关系,如“设备A在传送带B的左侧5米,二者存在物料流转关系”。
行为意图预测:基于目标的运动轨迹和历史模式,预测其下一步行为。如AGV小车当前路径与工人作业区域存在时空冲突风险,系统提前预警并重新规划路径。
闭环控制决策:认知结果直接驱动控制系统。当空间语义大模型判断某区域存在安全隐患时,可自动联动广播系统警示、调整设备运行参数,甚至调度无人机现场勘查。
正如智汇云舟创始人周舟所言,视频孪生技术是“借助实时视频,在空间智能场景下对人、车、地、物、事件等全要素进行时空理解、动态仿真与未来预测,联动具身智能后,就能在场景内完成‘感知-理解-决策-处置’的完整智能化管理闭环”。这一闭环的实现,使工业系统从“被动展示型工具”进化为“主动运营型平台”。
四、应用验证:从标杆项目看差异
技术差异最终体现在应用成效上。在北京大兴国际机场高速项目中,智汇云舟的视频孪生平台实现了27公里全路段的智能巡检与融合指挥。传统数字孪生系统或许能展示路况模型,但当事故发生时,空间语义大模型能够快速定位事故点、分析影响范围、调度最近救援资源,将事故处置时间大幅缩短。
在海淀AI原点社区,异常事件处置时间从80分钟压缩至10分钟以内。这种效率提升的背后,是视频孪生系统对社区内人员、车辆、设备的实时空间语义理解——系统知道“谁是常驻人员、谁在异常徘徊、哪条通道当前拥堵”,并基于此做出智能响应。
五、结论:通向空间智能的未来
数字孪生工业系统与视频孪生工业系统平台的本质区别,在于前者是“空间的镜子”,后者是“空间的大脑”。传统数字孪生完成了物理世界向数字世界的复刻,而智汇云舟视频孪生在此基础上实现了数字世界对物理世界的认知与干预。
“孪舟”引擎和空间语义大模型,正在引领这场从“可视化”到“智能化”的范式跃迁。在工业4.0的深水区,企业需要的不仅是一个展示数据的“数字沙盘”,而是一个能够理解生产现场、预测潜在风险、驱动自动决策的“空间智能体”。视频孪生,正是打开这扇门的钥匙。


