

 2717
2717
三相BLDC电机在汽车电子中应用十分广泛,例如座椅风扇、充电小门执行机构、主动进气格栅以及空调出风口等场景。对于这类车载小型执行机构,工程师通常希望在满足可靠性的同时,实现系统的低成本、小型化和轻量化设计。
针对这一需求,纳芯微推出了专用小型电机驱动芯片 NSUC1610。该芯片在单器件中集成了车载高压LDO、LIN PHY、Gate Driver、MOSFET以及基于ARM内核的MCU,可为三相BLDC电机提供高度集成的控制方案,从而简化系统设计并提升车载电机控制的可靠性。
本文将从BLDC电机的工作原理出发,介绍无感控制的基本方法,并结合NSUC1610的硬件架构解析其三相BLDC驱动方案的实现方式。
01 BLDC工作原理
电机产生的电磁转矩可表示为:T = I × (K_T × sinθ)
I为线圈内的电流
K_T为电机转矩常数
θ为定子磁链和转子磁链的角度
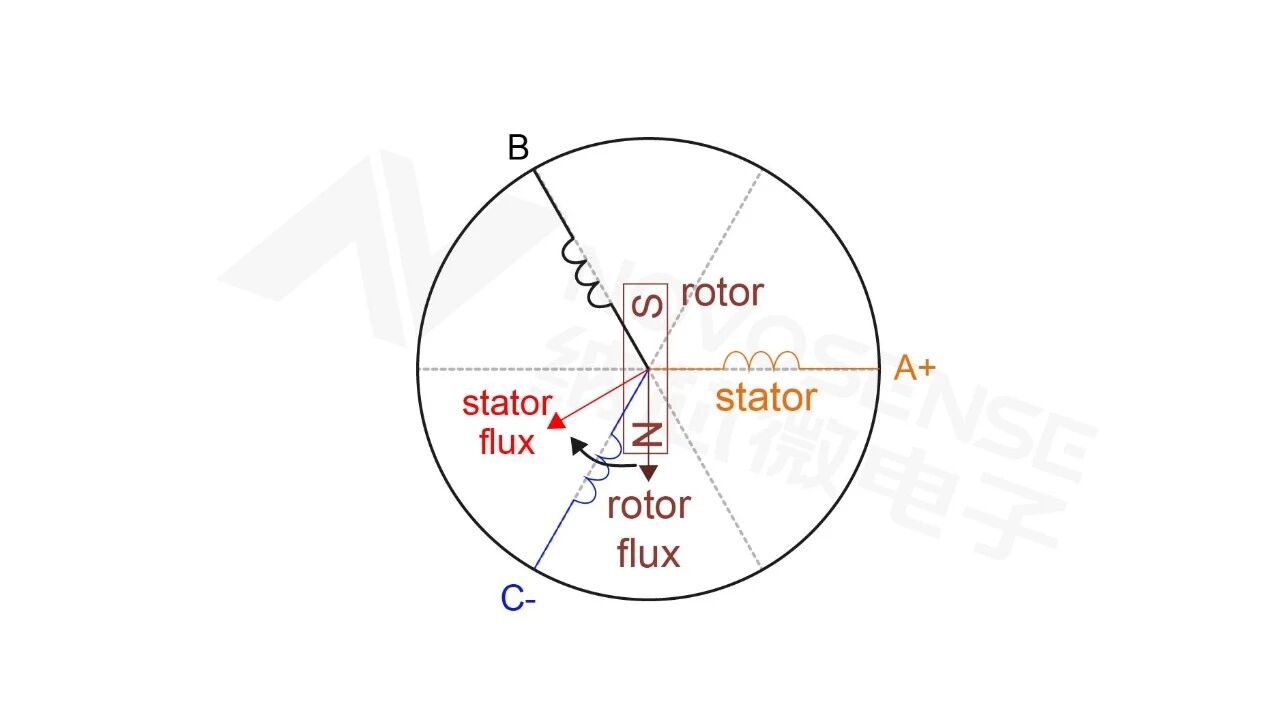
图1.1 三相无刷电机磁链简图
无感控制的基本原理是通过检测六步换相过程中悬空相的反电动势变化来判断转子位置,从而确定合适的换相时刻。在电机旋转过程中,转子永磁体产生的磁场会切割定子绕组,根据电磁感应原理,绕组中会产生感应电动势,即反电动势。
如图1.2所示,以 A、C 两相施加 12V 电压为例,此时 B 相处于悬空状态,其反电动势Vbe会经历由负到正的变化过程。由于三相电机的虚拟中性点电压约为母线电压的一半(约6V),因此 B 相的相电压可表示为6 + Vbe。
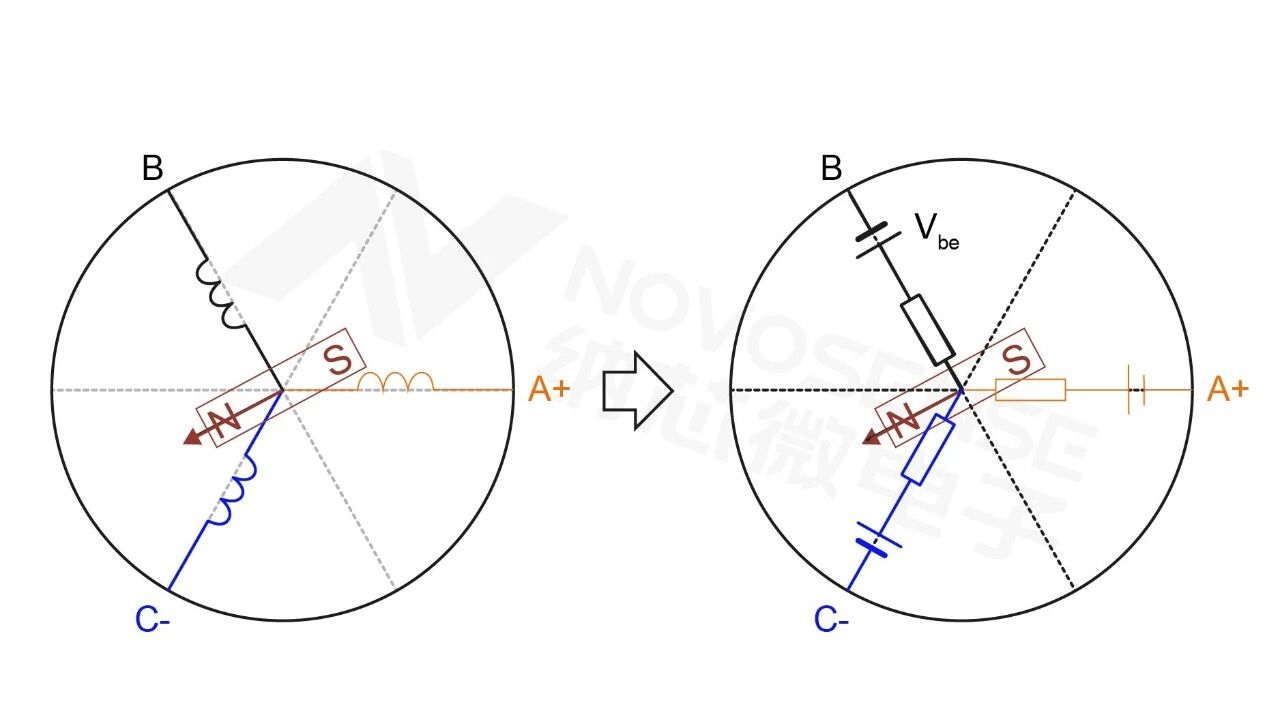
图1.2 BLDC感应电动势
三相BLDC需要三个半桥驱动,其拓扑图1.3所示。
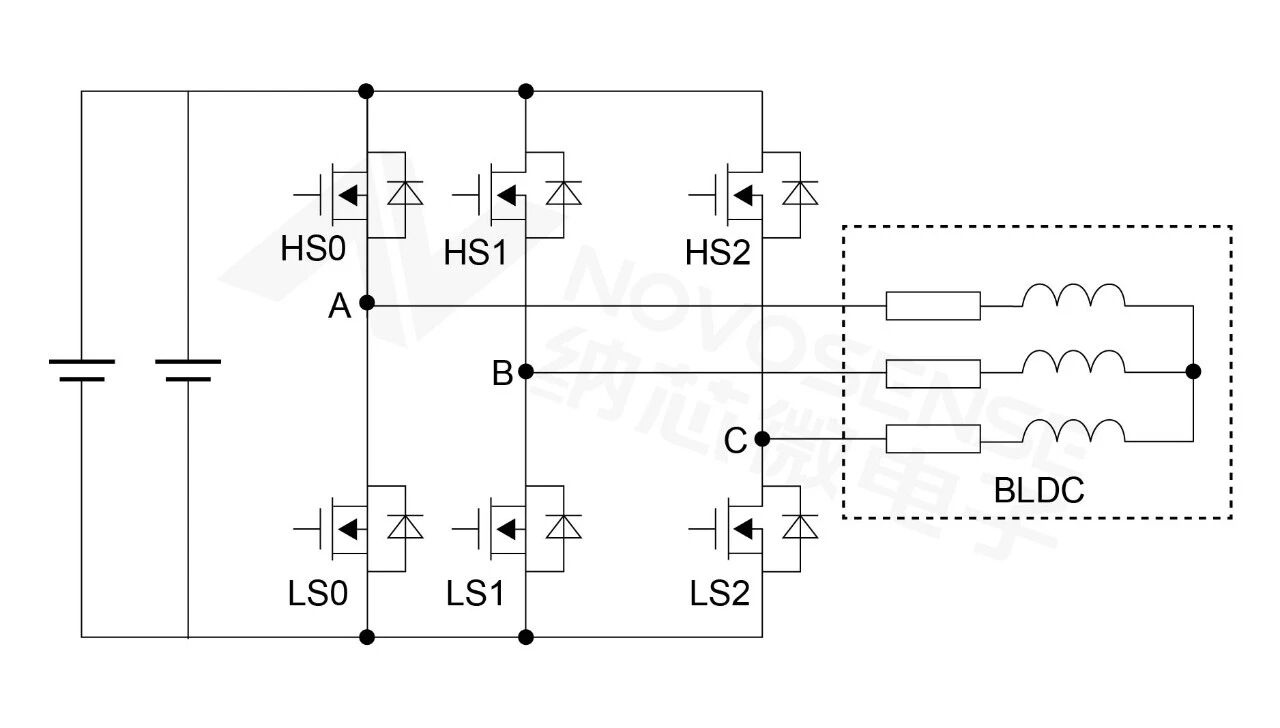
图1.3 三相半桥逆变驱动结构
02 NSUC1610 介绍
NSUC1610内部集成了丰富的电机控制外设,包括 3路捕获比较模块(CAPCOM)、3路反电动势比较器(BEMFC)、模数转换器(ADC)、PWM控制模块、温度传感器、4路MOSFET半桥输出(MOUT)以及LIN通信接口(LIN PHY) 等。
其中,片上的 4路MOUT半桥驱动可直接驱动小功率直流有刷电机、三相无刷直流电机以及两相四线步进电机,并可通过不同控制算法实现多种电机控制应用。
此外,芯片内置的 BEMFC反电动势比较器支持BLDC电机反电动势过零检测,可用于实现BLDC电机的无感六步方波控制。
图2.1展示了NSUC1610的内部资源框图。
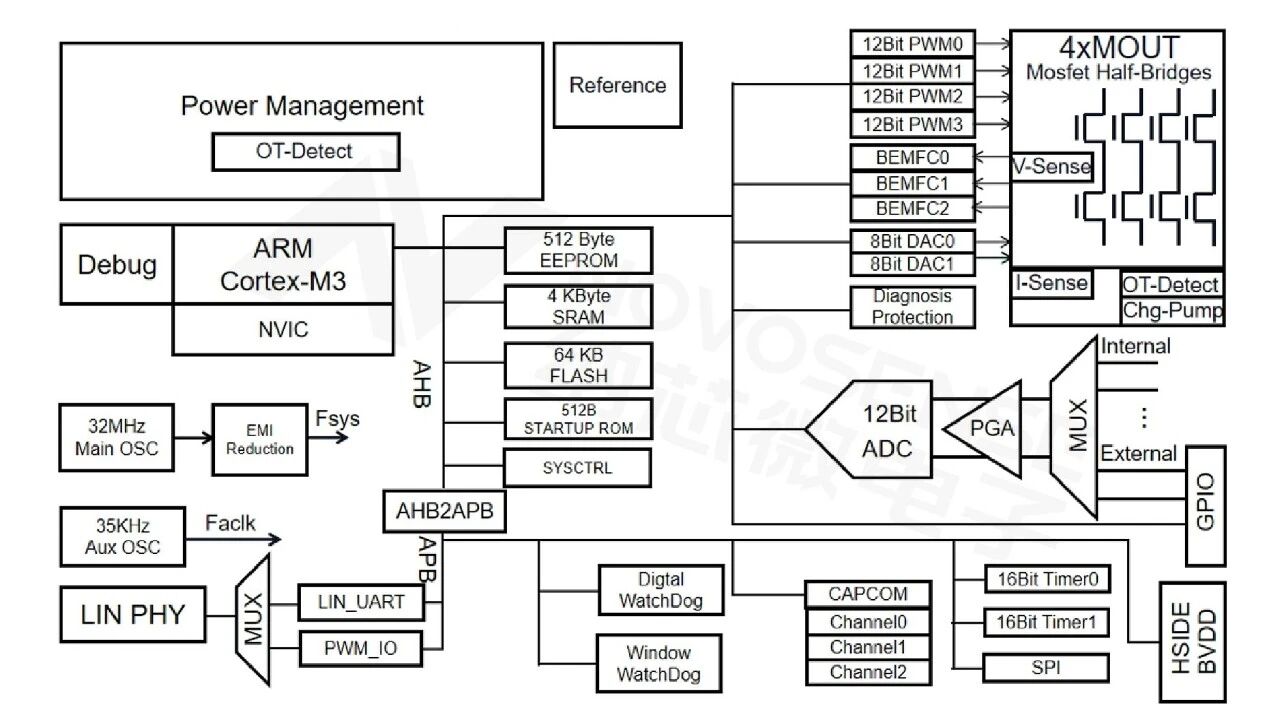
图2.1 NSUC1610内部资源框图
03 基于NSUC1610的BLDC方波控制
BLDC常见的控制方式为六步方波控制。在每个换相周期中,三相绕组中两相导通,一相悬空,通过按照特定的导通顺序切换各相绕组的通断状态,即可驱动电机实现顺时针旋转(CW)或逆时针旋转(CCW)。
在 CW(顺时针)模式下,扇区切换顺序为:
SECTOR0➝1➝2➝3➝4➝5➝0
图3.1展示了扇区0~5对应的三相电流与反电动势波形,其中绿色曲线表示相电流,蓝色虚线表示相电压(反电动势)。
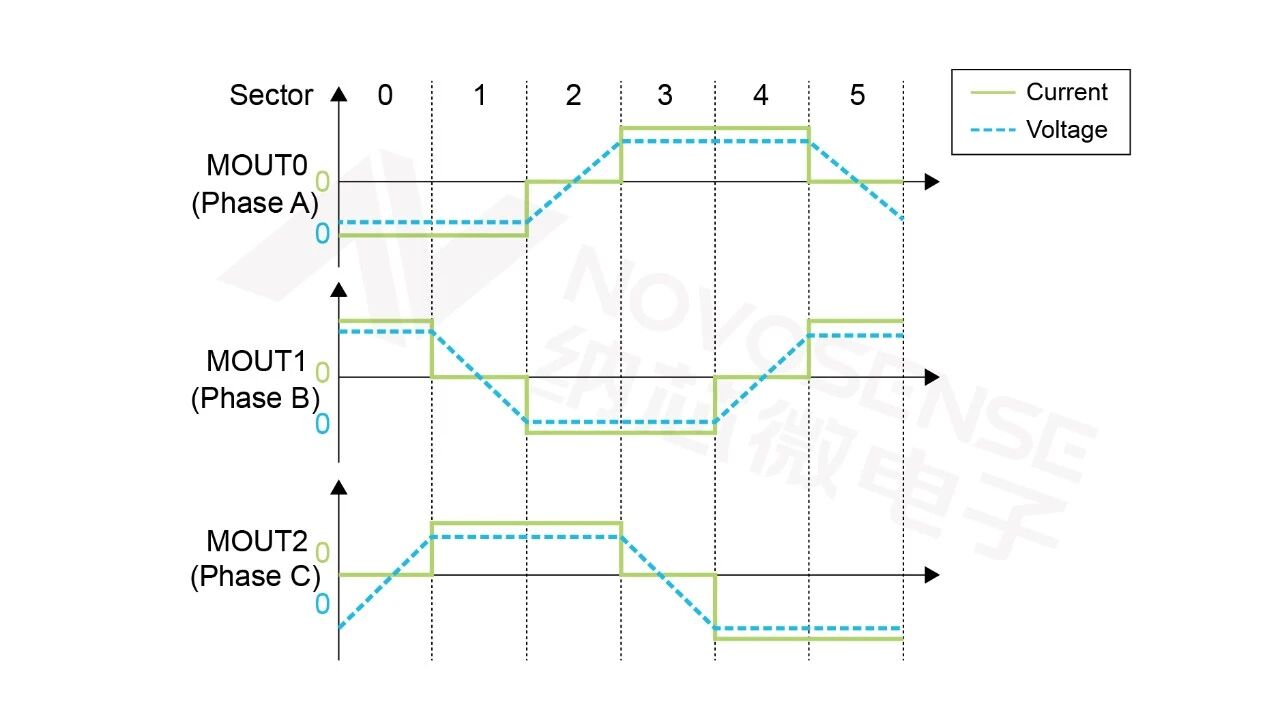
图3.1 CW 模式下不同扇区对应的反电动势波形
SECTOR0➝5➝4➝3➝2➝1➝0
扇区0~扇区5的三相电流和反电动势波形如图3.2所示。
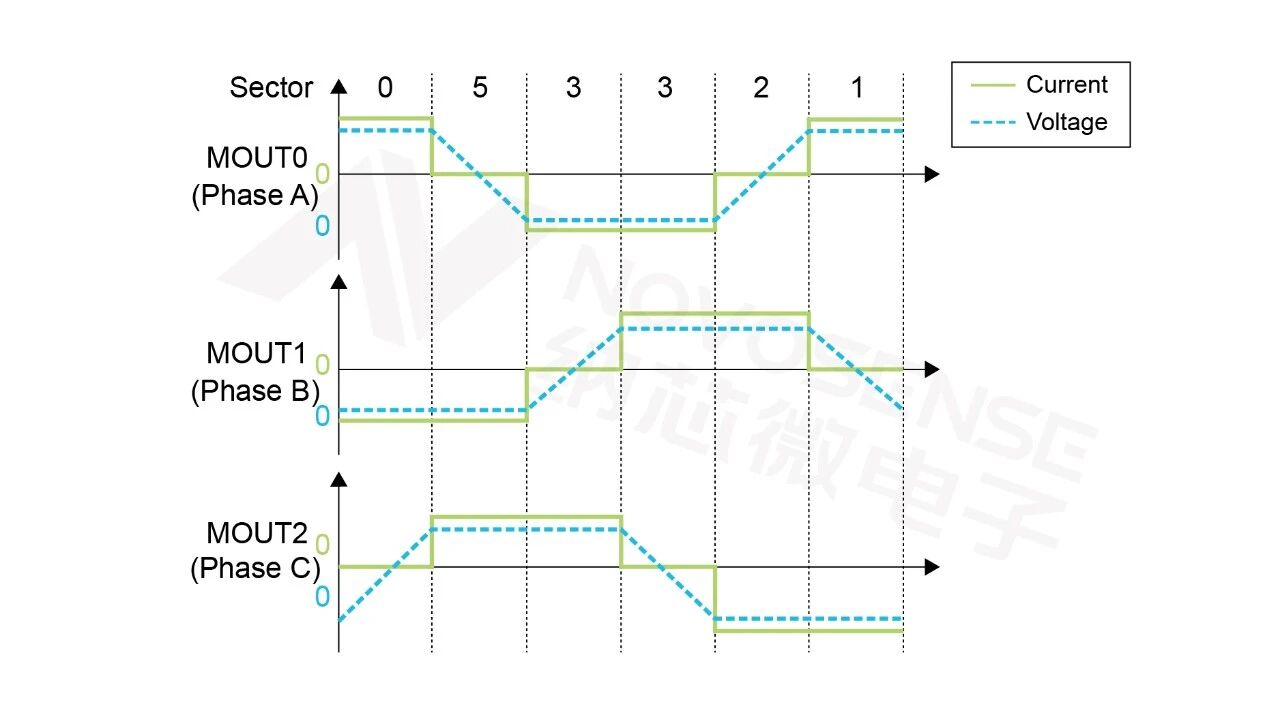
图3.2 CCW 模式下不同扇区对应的反电动势波形
在一个电角度旋转周期内,BLDC三相绕组的相电压变化如图3.3所示。当发生换相时,原本导通的绕组会进入浮空状态,但由于线圈中仍然存在电流,电感电流无法瞬间降为零,因此会产生一段退磁时间(Demagnetization Time)。
在这一阶段,绕组中的续流电流仍然存在,使得相电压主要由续流电流产生的电压分量决定,此时测得的反电动势信号尚不能准确反映转子位置。待绕组中的能量逐渐释放完毕后,绕组电压重新由切割磁力线产生的反电动势主导,此时的反电动势信号才可作为转子位置检测和换相控制的依据。
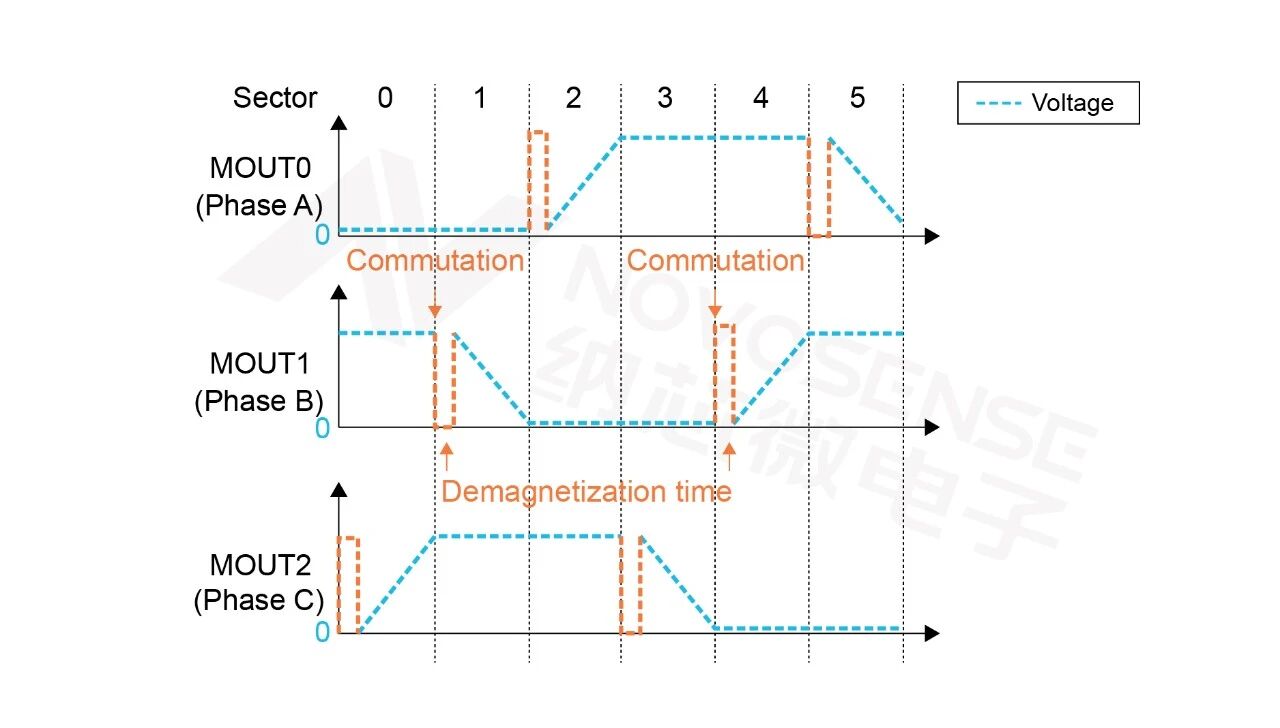
图3.3 电机绕组三相电压波形
在续流结束后,使能反电动势过零检测。当检测到反电动势过零点时,通过CAPCOM模块捕获该时刻,并设置比较值用于实现 30°电角度延时换相。
下一次换相比较值计算如下:
NextCompare = CaptureVal + (LastStepAvg / 2)
图3.4展示了各变量对应的时间关系。
为了避免在某些扇区未检测到反电动势过零点的情况,在每次换相后还会设置 强制换相点(Forced Commutation)。当系统未检测到过零信号时,电机会在该强制换相点执行换相,从而避免因过零检测失败导致电机运行异常。
其中 LastStepAvrg 表示最近六个扇区时间的平均值。
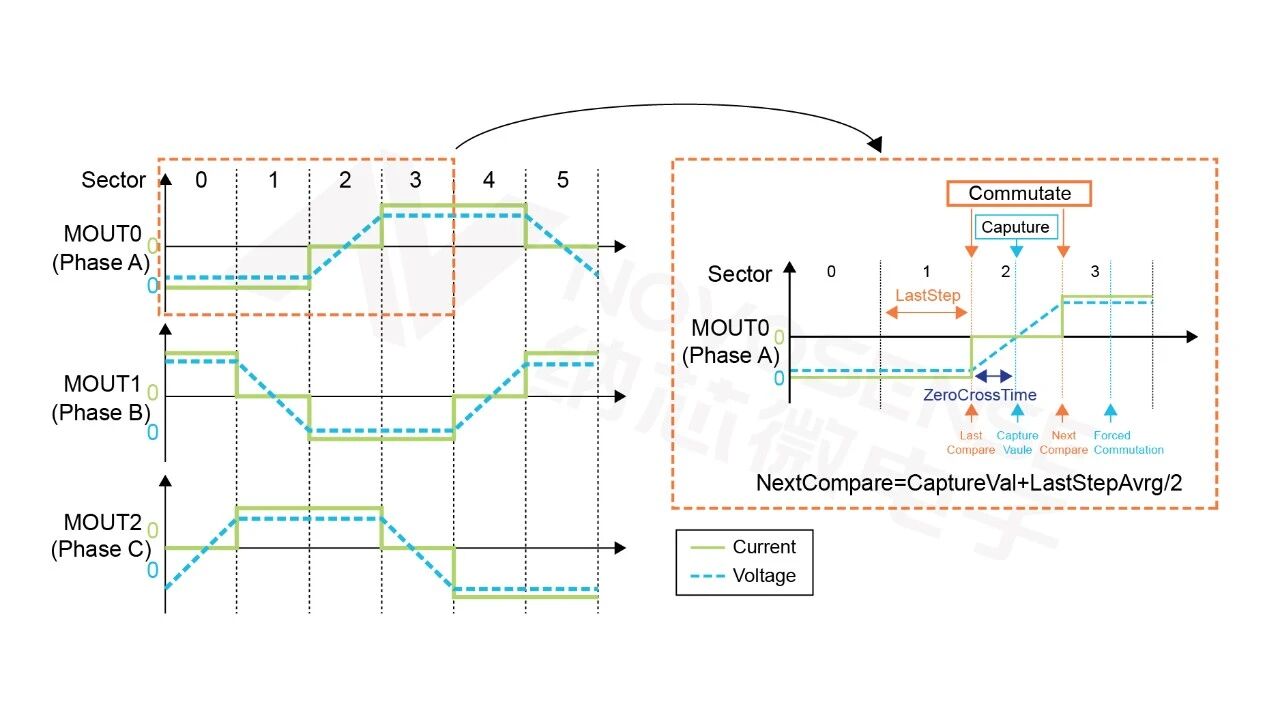
图3.4 电机换相逻辑图
下面介绍 NSUC1610 中反电动势过零检测的硬件实现方式。
NSUC1610内部集成了 三个反电动势比较器(BEMFC0、BEMFC1、BEMFC2),用于实现三相反电动势的过零检测。比较器的输出结果可作为 虚拟三相 Hall 信号,用于驱动三相BLDC无感六步方波控制算法。
具体实现方式如下:三相电压的虚拟中性点(Virtual Star Point)连接至BEMFC0、BEMFC1、BEMFC2 的正向输入端;各相桥臂电压分别连接至比较器的反向输入端,其中:
mout2 连接至 BEMFC1 的反向输入端
mout1 连接至 BEMFC2 的反向输入端
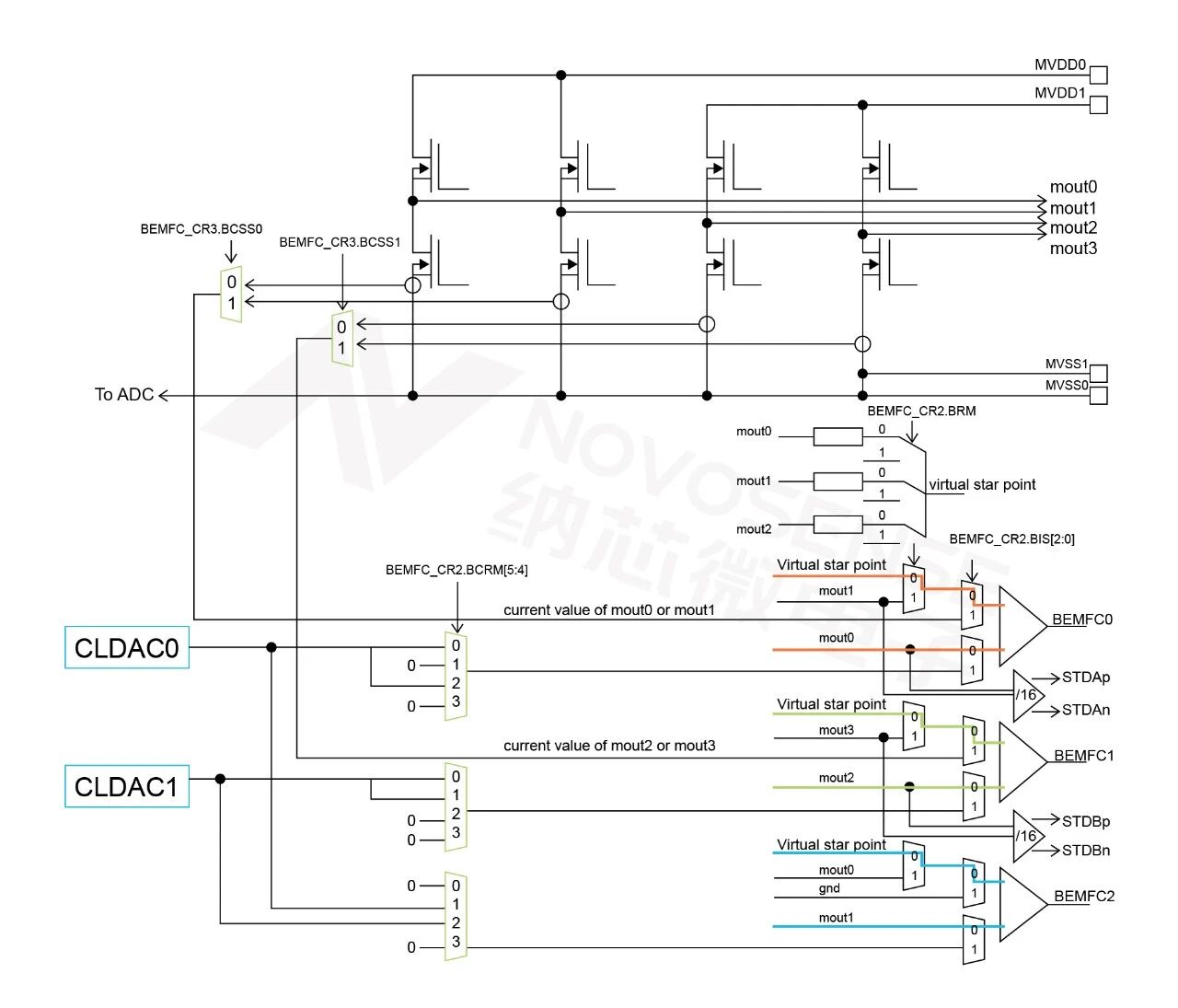
图3.5 反电动势比较器的输入通道连接方式
反电动势比较BEMFC模块的配置代码如下:
BEMFC->CR2_b.BRM = 0; // 0:虚拟星点参考 1:相位电压参考
BEMFC->CR2_b.BIS0 = 0; // 0:电压传感输入 1:电流传感输入
BEMFC->CR2_b.BIS1 = 0; // 0:电压传感输入 1:电流传感输入
BEMFC->CR2_b.BIS2 = 0; // 0:电压传感输入 1:电流传感输入
CAPCOM1 用于捕获 mout2 的过零点
CAPCOM2 用于捕获 mout1 的过零点
CAPCOM->CCR_b.CIS0 = 1; // CAPCOM source:0:GPIO 1:BEMFC
CAPCOM->CCR_b.CIS1 = 1; // CAPCOM source:0:GPIO 1:BEMFC
CAPCOM->CCR_b.CIS2 = 1; // CAPCOM source:0:GPIO 1:BEMFC
当电机以 CW 或 CCW 方向旋转时,在同一扇区内浮空相的反电动势变化趋势保持一致,即呈现 递增或递减的特性。
以 扇区0 为例,无论电机以 CW 还是 CCW 方向旋转,浮空相 MOUT2 的反电动势均呈 递增趋势(↗),因此需要检测其上升过零点。
六个扇区中需要检测的通道及对应的反电动势变化趋势总结如 表3.6 所示。
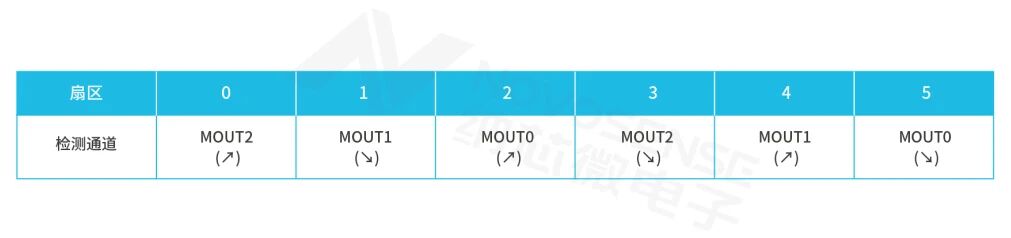
表3.6不同扇区对应的检测通道

表3.7不同扇区CAPCOM配置
通过上述配置,利用 NSUC1610 的片上资源即可实现对 BLDC 浮空相反电动势的检测与捕获。
在 NSUC1610 的硬件模块与控制算法协同作用下,可实现 BLDC 从 电机启动到速度闭环运行的完整控制流程。图3.8展示了 NSUC1610 驱动下的 BLDC 三相电压与电流波形。
从测试结果可以看出,电机启动及运行过程中三相电流过渡平滑,未出现明显电流尖峰,验证了该方案能够实现 稳定可靠的 BLDC 启动及闭环控制。
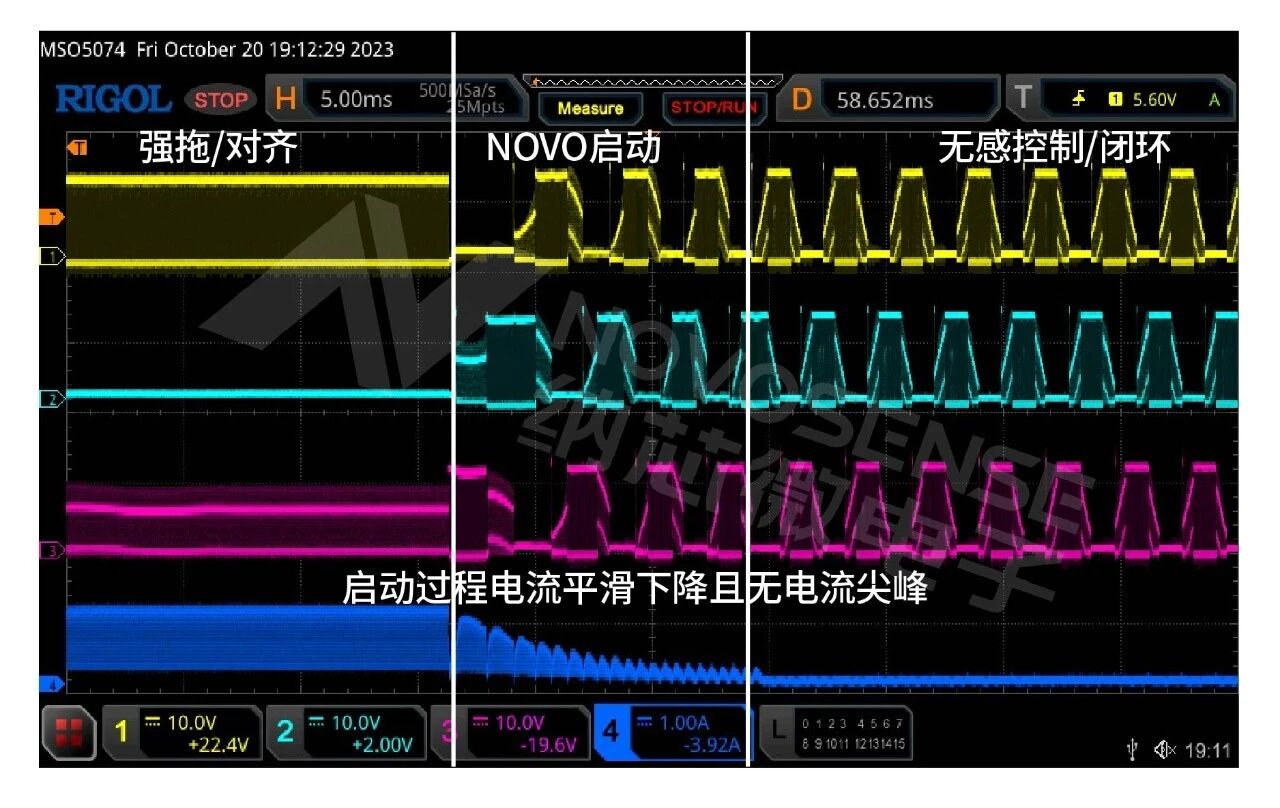
图3.8 NSUC1610 驱动下的 BLDC 三相电压与电流波形
联系我们
通过将MCU、LIN通信、电机驱动以及功率MOSFET等功能高度集成在单芯片中,NSUC1610能够显著简化BLDC电机控制系统的硬件设计。结合内置反电动势比较器和CAPCOM模块,可实现稳定可靠的无感六步控制方案。
该方案非常适用于汽车小型执行机构应用,例如主动进气格栅、充电小门以及座椅风扇等场景,为汽车电子系统提供了一种高集成度、低成本且易于开发的电机控制解决方案
如需算法实现或技术支持,请联系 sc_marketing@novosns.com;如需样品及开发板支持,请联系 sales@novosns.com。更多产品信息与技术资料,敬请访问www.novosns.com。



