

 303
303
承接上文设计建议,继续介绍PDM接口的数字时钟和带宽。
数字麦克风需要一个来自主机设备的时钟信号。时钟设置麦克风二进制数据输出的时间。允许的时钟频率在芯片的数据手册中指定。PDM接口的带宽受到时钟频率的限制,因为在较高的麦克风输出信号频率下,量化噪声会增加。高时钟频率可使噪声成形,即将噪声从音频频率推到更高的频率,从而由更高的时钟频率提供。过采样比率(OSR,抽取因子)是PDM接口时钟频率与基带采样率的比率。一个典型的OSR是64,但没有明确的标准。根据奈奎斯特定理,采样率必须是音频带宽(BW,最高使用音频频率)的两倍。OSR和带宽决定所需的时钟频率:
最小时钟频率需要为全音频频带(20Hz - 20kHz)是2.56MHz (OSR 64)。常用的2.4MHz时钟使一个18.75kHz音频带宽(与OSR 64)。
一些标准的音频采样率存在,例子可以在表4中找到。
使用高超声频率要求PDM接口时钟频率明显高于可听频率。一个40kHz带宽(与OSR 64)需要5.12MHz或更高的时钟频率。
左/右通道多路复用是通过使用上升和下降的时钟信号边缘来驱动两个麦克风(通道)。多路复用的工作原理是,在每个时钟边缘,一个麦克风在传输,而另一个处于高阻抗状态。例如,在上升时钟信号上,数据通道维护(写入)数据到数据线上,数据进入高阻抗(HiZ)状态。类似地,在一个下降的时钟信号,通道DataR维护数据和数据进入高阻抗状态。当处于高阻抗状态时,麦克风对输出数据线是电不可见的。这允许每个麦克风在另一个安静地等待轮到它时(在HiZ状态)驱动数据线的内容。
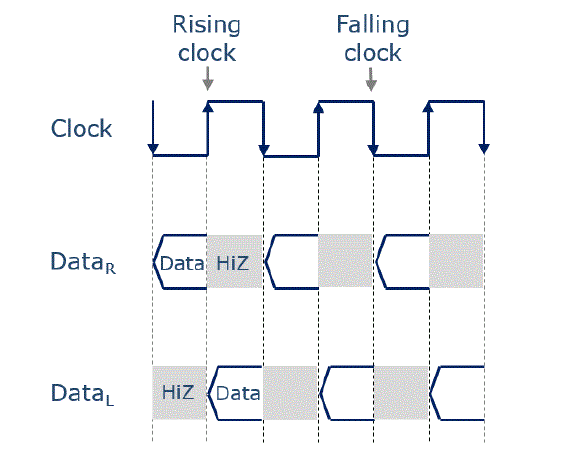
图8 L/R通道多路复用,在单一数据线上使用两个麦克风
在将不同的麦克风模型或多个供应商的麦克风实现到同一设备时,确保它们的接口属性允许它们无缝地协同工作是非常重要的。例如,当在一条数据线上使用两个PDM麦克风时,它们的定时参数必须兼容。当然,麦克风系统和麦克风的计时也必须匹配。

图9 在数据线上实现两个麦克风的数字定时
(基于保密原则,这里省去部分具体产品参数列表)
除了定时参数,麦克风的IO(输入/输出)电压水平也必须指定,以确保麦克风在系统中与其他麦克风一起工作。选择正确的电平有助于减少数据错误(当麦克风实际输出为0时,麦克风的输出被解释为1,或者反之亦然)。
数据线的属性影响接口的功能。因此,传声器能够驱动的数据线(Cload)上的最大输出负载电容通常也在传声器数据表中指定。设备中的数据线应与所需的最大Cload兼容。
当麦克风处于待机模式时,麦克风的数据引脚通常被指定为处于高阻抗状态。
PDM MEMS麦克风的输出被转换成模拟信号供人耳使用(通过低通滤波)或PCM(脉冲编码调制)数字信号,在设备系统中传递。例如,DSP系统接受PCM作为输入(但不能处理PDM)。转换到PCM是由一个采用降频数位滤波器根据过采样率对信号进行采样。采样率降低增加了数字信号的字长,因此基带率PCM信号不再是1位信号。典型的结果字长为16、20或24位。噪声的可听到频率的混叠。必须使用降频数位滤波器来防止PDM信号中的超声波频率。该滤波器系统系统可以包括在麦克风PCM输出。PCM/I2S麦克风没有PDM输出麦克风那么受欢迎。
传声器的两个关键参数是信噪比(SNR)和声过载点(AOP)。这些参数反映了麦克风可以处理的最安静的声音(SNR)和麦克风可以检测到的最大声音,同时保持一个合理的失真水平(AOP;THD上升到10%以上的声压级)。通过结合这两个参数,我们可以确定麦克风可以检测的整个声级范围,从噪声底部到过载点;
对于基于PCM的音频系统组件,如ADC和编解码器,动态范围和信噪比的测量方法与麦克风信噪比有很大的不同。麦克风信噪比定义为声输入为94dBSPL的1kHz正弦波时和麦克风无声输入(底噪)时麦克风输出的差值(单位为dB[A])。这是因为,麦克风信噪比是对麦克风自噪声可听性的测量,所以它是一个定义的声学“真实世界”信号。
ADC或编解码器的信噪比通常定义为最大输入信号电平和最小输入信号电平之间的差(单位为dB)。这种性能通常反映在所使用的数字编码方案的位深度上,通常是16位、20位或24位。这意味着音频组件的信噪比实际上与麦克风动态范围的关系比麦克风信噪比更密切。
选择的音频元件和数字编码方案必须具有与所使用的传声器的动态范围相等或更大的信噪比/动态范围。否则,这些音频部件的噪声地板将会主导系统,并不能实现麦克风的全部性能。比特数(N =字长)决定了基于PCM的ADC和编解码器的动态范围DR:

例如,对于16位系统,在上面的公式中插入16作为N,得到的动态范围约为98dB。在实践中,抖动使信噪比降低了约4分贝(抖动处理是有意添加的噪声,用于随机化量化误差,从而使系统线性化并消除噪声调制)。为了便于估计,上述方程可简化为:DR[dB] = N * 6(不考虑抖动处理)。
所有的数字信号都用dBFS (dB相对于全尺度)测量。满标度是数字编号系统中所能表示的最大数字。在PDM中,这用100%的1表示输出。在数字MEMS麦克风中,AOP通常近似于0dBFS(全尺度)。所有其他输出级别都指定为-xdBFS,表示它们低于full scale。动态范围的编解码器指定最低的dBFS级别,它可以通过。
如这里所示,麦克风和下游部件的全尺寸级别通常会与信号链动态范围保持一致。然而,噪音地板却不一定。这是因为0dBFS(全尺度)对于两个系统是相同的,但是由音频信号链使用的数字编号系统可能不能表示像麦克风噪声地板那样低的级别。这意味着,如果一个数字麦克风使用的数字编码方案没有使用足够的比特来表示麦克风的噪声底层,系统噪声将不能反映麦克风的真实性能。

图10 16位编码对这个麦克风没有足够的动态范围。系统的性能将受到音频编码方案的限制
如果高信噪比麦克风用于低动态范围的音频信号链(例如,16位),系统不能保持麦克风的信噪比性能(见图)。缓解这一问题的一种选择是使用具有较低AOP的麦克风。这可以实现,例如,通过校准麦克风增加灵敏度,例如-26dBFS而不是-36dBFS。这将把AOP从130个dBSPL减少到120个。底噪的dBFS值会增加,但由于全尺寸值(0 dBFS)减少了相同的分贝数(在声压级上),麦克风的底噪被保留。
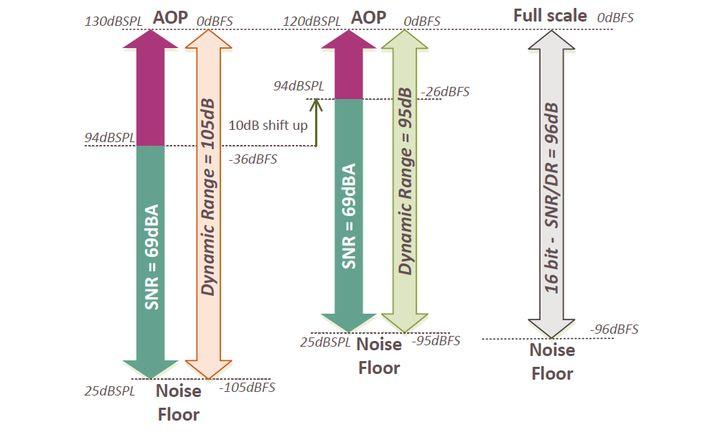
图11 再16位系统降低AOP以便允许高SNR实现
但是,如果同时需要高AOP (130dBSPL)和高SNR (69dB),则必须使用20位或24位音频信号链。



