

 1097
1097
在矿山智能化转型进程中,激光雷达凭借主动式三维感知、超高测量精度、强环境适应性等核心技术特性,成为破解矿山高粉尘、弱光照、无卫星信号、高危作业等复杂工况下安全与效率矛盾的关键技术支撑。其贯穿矿山全生命周期的深度落地应用,正推动传统矿业从高强度人工作业、粗放式开采,向数字化、无人化、精细化的智能矿山跨越式升级。
一、极端工况全天候稳定感知,适配矿山高危作业环境
极强的环境适应性与可靠的全天候感知能力,是激光雷达适配矿山复杂场景的核心优势。矿山井下、露天采场普遍存在高粉尘、水雾、光照骤变、机械强振动等问题,井下还伴有爆炸性气体,工况条件十分恶劣。传统可见光及视觉传感器易出现成像失效、识别失灵问题,难以持续稳定作业。适配矿山场景的本安型、隔爆型激光雷达,均通过煤矿、非煤矿山专项防爆安全认证,可在易燃易爆等高风险矿山环境中合规运行。设备依托多回波探测技术,能够有效穿透作业面的粉尘与水雾干扰,搭配定制化矿山 AI 降噪算法,滤除机械振动、杂散光点等环境噪声;即便在超大温差环境下,也可保持测距与成像精度稳定,真正实现 24 小时全天候常态化作业。
二、全域高精度三维建模,革新矿山测绘作业模式
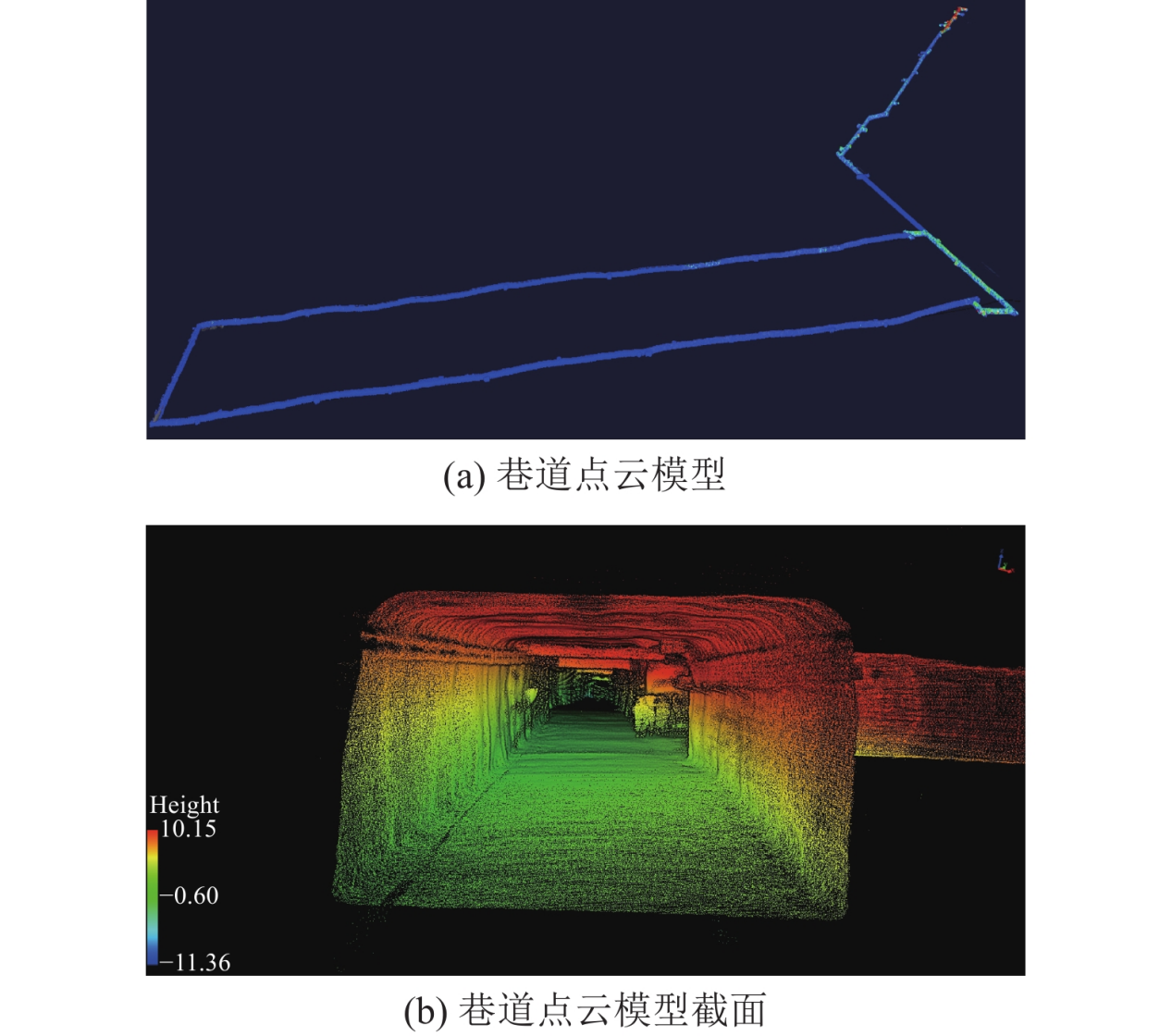
激光雷达高密度点云扫描技术,彻底革新传统矿山人工单点采样的测绘模式,解决了传统测绘效率低、数据覆盖不全、人员作业风险高等痛点。传统全站仪、RTK 人工测绘仅能采集离散点位数据,不仅作业耗时久、数据覆盖面有限,作业人员在井下巷道、高陡边坡等区域作业还面临极大安全隐患。手持激光雷达可快速完成井下巷道、硐室、狭窄通道的三维测绘,原本耗时数日的人工测绘工作,如今数小时即可完成,大幅压缩作业周期。搭载机载激光雷达的无人机,可在露天矿不停产的前提下完成全域地形扫描与建模;依托多回波技术剔除地表植被、浮土等遮挡物,精准提取矿坑地形、台阶坡面、开采边界等数据,生成高精度三维实景模型,为矿山开采规划、台阶参数校核、土方量核算提供可靠的数据支撑。
三、边坡与采空区动态监测,搭建矿山主动防灾体系
激光雷达的微形变监测能力,为矿山边坡失稳、采空区坍塌等地质灾害防控搭建起主动预警防护体系。露天矿山高陡边坡、井下采空区、巷道顶板是矿山主要安全风险源,传统人工巡检、定点监测模式存在滞后性强、覆盖范围有限、漏检率高等问题。激光雷达通过周期性重复扫描,完成矿山边坡、岩体、巷道围岩的全域数据采集,对不同时序的点云模型做差分对比,可捕捉岩体毫米级形变与位移,提前预判边坡滑移、顶板开裂、矿柱变形等隐患,实现地质灾害事前预警。针对人员无法抵达的废弃采空区、幽深巷道、高危边坡底部,搭载激光雷达的巡检机器人可自主穿行作业,实时构建高精度三维模型,精准识别围岩裂隙、空洞及变形区域,为地质灾害治理、采空区回填、边坡加固提供可靠数据依据。
四、无人感知与智能计量,赋能矿山高效智能运输
激光雷达融合感知技术,有效解决了矿山无卫星信号区域的定位与导航难题,全面提升运输环节的智能化水平与安全系数。井下无卫星信号、场景纹理单一、巷道样貌相似度高,传统导航方式极易失效。激光雷达 - 惯性 - 视觉紧耦合 SLAM 算法,可在井下、矿坑内部实现厘米级实时定位,为无人驾驶矿卡、井下运输机器人、巡检设备提供稳定、精准的自主导航支持。在运输计量场景中,激光雷达三维体积测量系统支持矿车不停车动态计量,替代传统地磅称重模式,测量精度稳定可控,彻底解决了地磅称重效率低、结算精度易受矿石含水率、杂质、车辆停放位置干扰等行业痛点。同时,车载激光雷达防撞系统可 360° 感知车辆盲区、巷道拐角及动态障碍物,实时触发减速、制动动作,大幅降低矿山运输过程中碰撞、碾压类安全事故的发生概率。
随着固态激光雷达硬件成本持续下降、小型化防爆技术日趋成熟,叠加多传感器融合、点云智能解算算法的迭代升级,激光雷达将深度融入矿山数字孪生管控体系,全面覆盖资源勘探、智能开采、安全监测、运输调度、生态修复全业务流程,助力矿山实现安全、高效、绿色、低碳的智能化高质量发展。


