

 1150
1150
摘要
机器人操作系统(ROS)驱动程序基于ADI产品而开发,因此可直接在ROS生态系统中使用这些产品。本文将概述如何在应用、产品和系统(例如,自主导航、安全气泡地图和数据收集机器人)中使用和集成这些驱动程序;以及这样将如何有助于迅速评估新技术,并避免出现与第三方产品的互操作性问题。在本文探讨的所有产品中,将重点关注最近发布的用于ADI Trinamic™电机控制器的ROS驱动程序,该驱动程序是用于嵌入式运动控制的完整板级模块,融合ADI Trinamic运动控制专业知识,以及ADI的模拟工艺技术和电源设计技能。1
什么是ROS?
ROS是机器人中间件,包含一组软件库和强大的开发工具(从驱动程序到先进算法),可作为机器人系统或应用的开发基础。ROS涉及多领域(例如,消费电子、工业、汽车等),支持多个平台(Linux、Windows、MacOS和一些嵌入式平台),而且100%开源,并提供商业选项。得益于来自全球技术社区的专用资源,ROS可获得丰富的支持,从而帮助用户简化其设计和应用。
该技术的工作原理是什么?
ROS始于2007年,已成为自动驾驶汽车、工业机器人、飞行器等领域备受欢迎的机器人开发原型制作平台。经过不断发展,该技术现在有两个版本:ROS1和ROS2。
ROS1和ROS2系统必须相互隔离,但通过ROS桥,这两个系统之间可进行通信和交换数据。有关更多信息,请访问ros2/ros1_bridge页面。
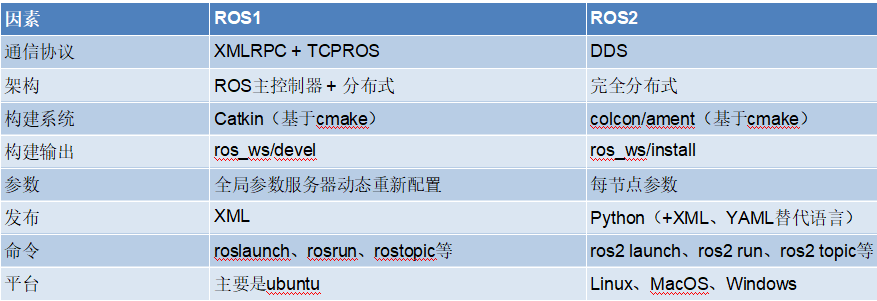
表1.ROS1和ROS2的主要区别2
ROS支持的平台
ROS Noetic是ROS1的最终版本,将于2025年5月终止支持,而ROS2自2020年6月推出以来,不断滚动更新发行版。
如需获取完整列表,请查看这些链接,以了解ROS1支持的平台和ROS2支持的平台。
ROS基本概念
图1显示了ROS的一些基本概念,包括功能包、节点、主题、服务和消息。
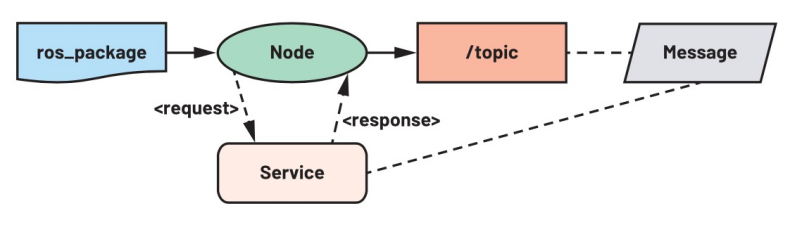
图1.ROS基本数据流。
注:对ROS1和ROS2而言,下文讨论的ROS基本概念相似。
功能包
ROS功能包是ROS程序或节点的主要组织系统。这是ROS中最核心的构建/发布项。创建ROS功能包时,请务必设置专用的ROS工作空间。该工作空间被称为catkin工作空间,其中catkin是ROS的官方构建系统。
节点
ROS节点是在ROS中创建的可执行程序。它们是执行特定任务的进程。ROS节点可使用ROS客户端库(如Python客户端库rospy和C++客户端库roscpp)相互通信。节点可以订阅和/或发布主题,也可以提供或使用服务。3
主题
ROS主题是ROS节点生成(或者发布,用ROS的术语来说)的数据通道。
在ROS中,发布者节点是主题的广播者,而订阅者节点是主题的收听者。
在图2中,generic_motor_control的节点是广播者。/cmd_vel是velocity_publisher发布的主题。这表示,velocity_publisher提供基于电机控制(或命令速度)的速度信息。
而ros_application的节点是收听者,velocity_subscriber订阅主题/cmd_vel。这表示,velocity_subscriber访问或使用velocity_publisher提供的速度信息。
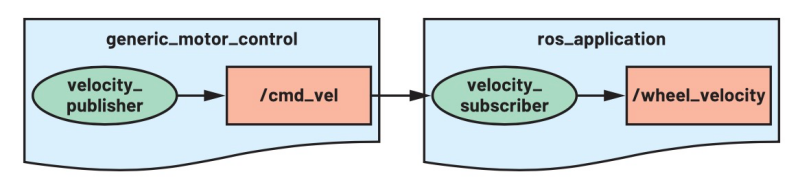
图2.发布者-订阅者。
消息
主题是数据通道,而消息是数据,采用与ROS兼容、适用于不同传感器的格式。
以下是适用于ROS消息格式的示例传感器:
- 飞行时间(ToF)摄像头:sensor_msgs/Image、sensor_msgs/PointCloud
- 惯性测量单元(IMU)传感器:sensor_msgs/Imu
- 电机控制:geometry_msgs/Twist
- 车轮编码器:geometry_msgs/TwistStamped、geometry_msgs/ TwistWithCovarianceStamped
ROS主题通过发送消息(主题发布者)或接收消息(主题订阅者)进行通信,并且必须采用匹配的数据类型。
例如,在图2中,来自velocity_publisher节点的速度信息(命令速度)希望被velocity_subscriber节点访问/使用。如果主题发布者velocity_publisher使用数据类型geometry_msgs/Twist,则主题订阅者velocity_subscriber也应使用相同的数据类型。
服务
发布者-订阅者通信模式是开放式模式,不适用于分布式系统中通常需要的回复交互。4
服务支持节点通过发送请求和接收响应进行通信。发布者-订阅者通信模式使用.srv文件,在这些文件中,指定了请求和响应的消息类型等服务描述。
服务是双向同步通信模式,其中包含客户端和服务器。服务器节点提供服务,而客户端节点发送请求并等待服务器节点做出响应。
例如,在图3中,server_node提供服务SetVelocity.srv以更改命令速度vel。该服务接受float32格式的速度值,并以字符串格式返回状态;如果设置了请求的速度,则为“success”;否则,为“FAIL”。
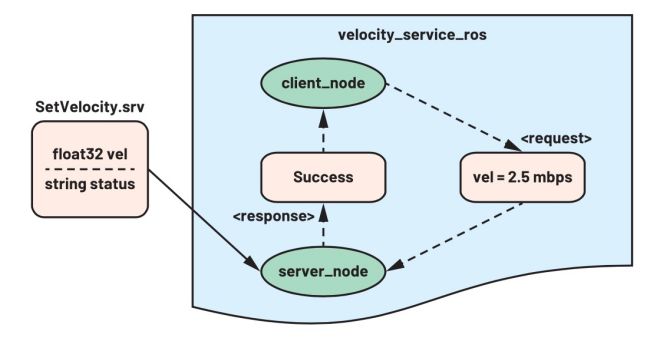
图3.使用服务示例。
client_node发送请求,将命令速度设置为2.5 mbps。server_node收到请求后,立即发送“success”响应。
将ADI解决方案集成到ROS生态系统中
ADI是ROS-Industrial联盟的正式成员,ROS-Industrial是一个开源项目,旨在将ROS软件的高级功能扩展到与工业相关的硬件与应用。5作为该技术社区的一份子,ADI最初的目标是面向工业领域开发专用模块。
ADI针对不同的专用模块开发了ROS驱动程序。为了展示所开发的驱动程序并利用ROS的功能,ADI公司开发了ADI自主移动机器人(ADAM)作为内部自主移动平台(参见图4)。

图4.ADAM。
ADAM:ADI自主移动机器人
ADAM由ROS提供支持,并搭载ROS支持的不同器件。该平台展示了ADI公司的ROS驱动程序如何集成到移动机器人应用中,特别是自主导航应用。
图5所示为具有不同模块的ADAM的简化硬件图。该ADAM主要连接以下器件:
- ADIS16470或IMU传感器采用精密陀螺仪、加速度计、磁力计和压力传感器的多轴组合,这些器件主要用作检测反馈,用于改善位置/方向估算。
- ADBMS6948是一款多单元电池监控器,可测量多达16个串联连接的电芯,在整个温度范围内具有较高的测量精度。
- EVAL-ADTF3175D-NXZ或CMOS ToF提供出色的高分辨率,与深度计算和处理、激光驱动器、电源管理以及具有参考固件/软件的开发工具相辅相成,可带来更多优势。
- ADI Trinamic电机控制器是用于嵌入式运动控制的完整板级解决方案,融合ADI Trinamic运动控制专业知识,以及ADI的模拟工艺技术和电源设计技能。1
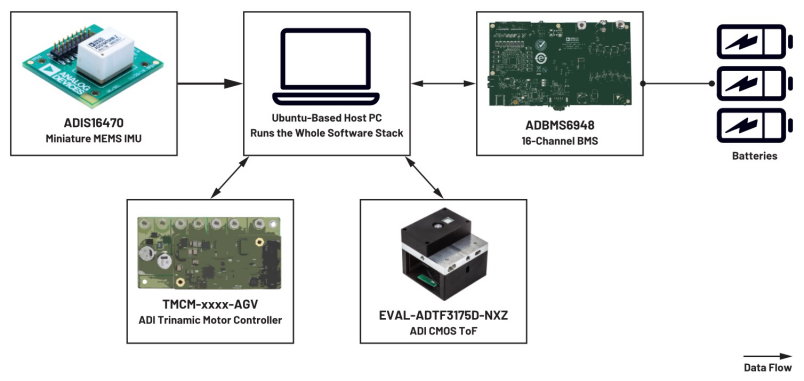
图5.ADAM的简化硬件图。
图6所示为ADAM的简化ROS架构,该ADAM使用ROS驱动程序和自主导航所需的多个应用/算法节点。IMU数据(/imu/data_raw)和ADI Trinamic电机控制器反馈(/tmc_info)用作姿态估算的输入,从而得到机器人的里程测量结果(/odom)。激光雷达数据(/scan)是用于生成地图的同步定位与地图绘制(SLAM)算法的主要输入;ToF数据(/image_raw)还可用作其他SLAM算法的输入。然后,move_base节点将等待用户发出任何目标姿态,并向ADI Trinamic电机控制器发送速度命令(/cmd_vel),使机器人移动。
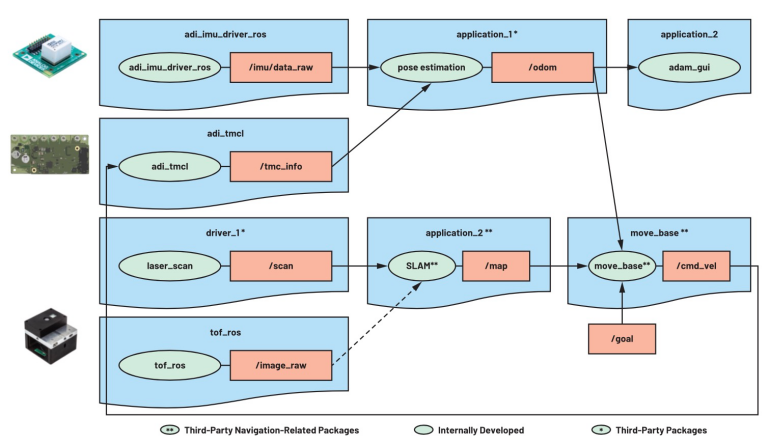
图6.ADAM导航堆栈的简化ROS架构。
ADI Trinamic电机控制器ROS驱动程序
ADI Trinamic电机控制器(TMC)是用于嵌入式运动控制的完整板级解决方案,融合ADI Trinamic运动控制专业知识,以及ADI的模拟工艺技术和电源设计技能。1支持单轴/多轴步进电机、无刷直流电机(BLDC)等各类电机,可用接口包括CAN、EtherCAT®、RS-232、RS-485和USB,支持的协议涵盖Trinamic运动控制语言(TMCL™)、CANopen® over EtherCAT (CoE)、CANopen或Modbus。1
名为TMCL-IDE的IDE可帮助用户开发应用并对这些模块轻松重新编程。该IDE使用TMCL实现独立操作,或使用标准化CANopen®协议,允许用户设置参数、实时对数据进行可视化处理,并开发/调试独立应用。
由于TMC使新型智能执行器成为可能,并且随着ROS日益普及,尤其是在机器人领域,我们针对这些模块开发了额外支持,如ROS驱动程序,从而进一步扩展制造业和工业自动化的用例。具体来说,预计这些ROS驱动程序将能够:
- 控制电机的速度、位置或扭矩
- 监控电机控制器和电机信息
TMC ROS驱动程序与TMCL-IDE提供的功能相似,但它能够让支持ROS的系统节点轻松使用这些TMC,无需安装任何其他驱动程序。截至本文发表之时,该驱动程序仅支持CAN接口(特别是SocketCAN),其他接口正在开发中,很快也将提供支持。
此处列出了目前支持的ADI Trinamic电机控制器模块(TMCM)。
软件架构
图7所示为adi_tmcl的简化软件架构。
如图7所示,由于adi_tmcl使用大多数Linux系统默认支持的SocketCAN驱动程序,所以不需要任何额外的驱动程序。此外,adi_tmcl具有自己的TMCL协议解析器,因而能够理解用户请求的符合TMCL的发送/接收命令。作为最后一层,tmcl_ros_node以发布者、订阅者和服务的形式在ROS系统上提供直接接口。每种形式均提供特定的功能,这些功能可使用以下部分详细介绍的一组参数进行配置。
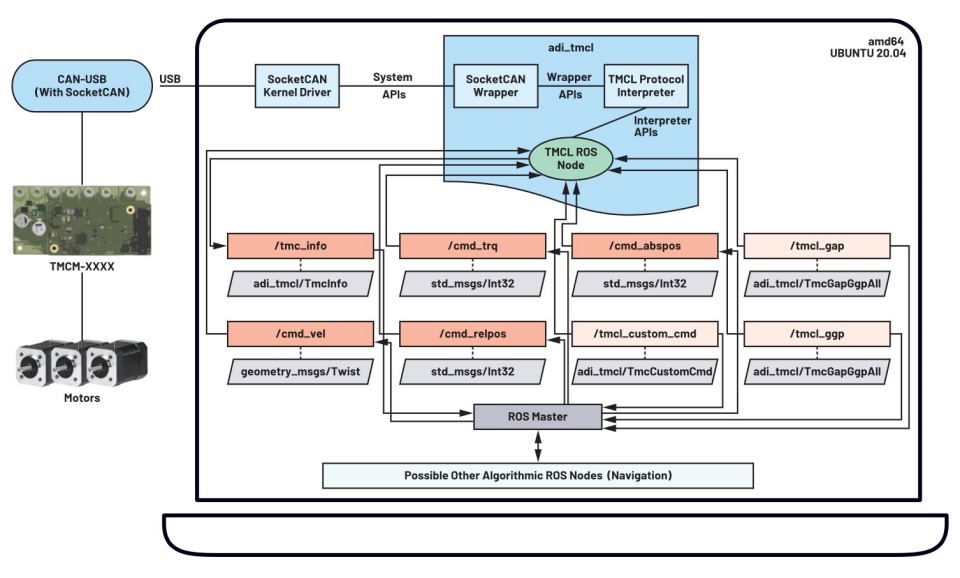
图7.adi_tmcl的简化软件架构。
特性
adi_tmcl提供一系列特性,包括:
1. 支持不同的TMC板
2. 使用TMCL-IDE对TMC模块进行一次性配置
3. 移动/停止电机
4. 能够获取TMC/电机信息
5. 执行自定义TMC命令
6. 能够获取所有轴参数值
7. 能够获取所有全局参数值
8. 支持多个TMC板设置
9. 轻松集成到ROS系统/应用中
敬请关注下月《模拟对话》中的文章“掌控搭载ROS1驱动程序的Trinamic电机控制器”,文中将详细探讨这些特性,并举例说明如何使用这些特性。
结论
利用ADI Trinamic电机控制器可实现新型智能执行器。随着ROS日益普及,尤其是在机器人领域,我们针对这些模块开发了额外支持,如ROS驱动程序,旨在进一步扩展制造业和工业自动化用例。
在本文中,我们展示了ROS如何扩展器件,带来以下优势:
- 提供附加价值,比如扩展工业应用;
- ►通过ROS通信框架,与第三方产品可轻松实现互操作;
- 提供更广泛的选项,方便客户在其系统中选用ADI产品;
- 快速评估新技术并立即开始使用。
欲了解更多信息,请访问ADI工业机器人页面。
探索永不停息
- 敬请关注有关ADI Trinamic电机控制器ROS1驱动程序的文章,深入了解相关信息
- 敬请关注未来发表的有关用于ADI Trinamic电机控制器的ROS2的文章
- 下载ADI Trinamic电机控制器ROS1和ROS2驱动程序
- 购买ADI Trinamic电机和电机控制器评估板
参考文献
1“用于电机和运动控制的ADI Trinamic硬件。”ADI公司
2“ros2/ros2_documentation。” GitHub, Inc.
3“了解ROS节点。” ROS.org.
4“服务。”ROS.org.
5“ROS-Industrial。”ROS.org.
“适合运动控制应用的工业通信协议和接口。”ADI公司

 下载ECAD模型
下载ECAD模型





