

 204
204
当前,智能驾驶领域技术高速发展,智能驾驶进入了商业化和规模化进程。伴随着域融合和中央计算的大势所趋,智能驾驶域控制器和汽车的中央计算机也成为了智能驾驶技术的重中之重。
另一方面,中间件是域控制器中重要的软件模块。作为承上启下的重要组成部分,一面承载着所有硬件提供的服务,一面承担着应用层数据交互的任务。整车通用的平台是否灵活、稳定,其中的应用层起着举重若轻的作用。在此基础上,OEM和供应商开发出了自动驾驶、智能座舱等许多功能域的中间件,构成模块化的专用平台。
畅行智驾是中科创达面向域控算力平台的子公司,旨在为全球客户提供领先的汽车智能域控制器产品和解决方案,其中就包括域控制器的中间件。在面对自动驾驶软件中间件开发过程中的挑战以及如何解决这些困难等整个行业持续探索的问题,畅行智驾在产品的研发中也形成了自己的答案。
图片来源:盖世汽车
数智化转型趋势已至 架构演变催生行业变革
过去,得益于CAN总线的优势,汽车的EE架构往往以分布式的形式呈现,增加新的功能只需增加总线的ECU数量。
随着汽车行业的智能化演进,自动驾驶的水平不断提高、功能不断丰富,整车搭载的传感器数量越来越多,功能也在不断泛化,传统的分布式电子电气架构已难以满足未来智能网联汽车的需求。于是,百年汽车工业开始向基于中央计算的集中式电子电气架构演进,域集中式或跨域集中式的电子电气架构正加速来临,新的总线技术也将会应用到汽车之中。
此外,汽车本身的产品特性也在发生变化。得益于通讯的快速发展及互联网的接入,如今汽车已经由封闭系统转变为开放系统,原有的Tier1技术垂直研发的模式也已然发生变化——从过去的软硬一体演变为软硬分离,在不同层次,有不同的供应商以不同的形式参与进整车开发和量产。
在市场对智能汽车日益增长的需求下,软件开发量和车载算力也与日俱增。OTA技术的产生则为汽车软件不断更新迭代奠定了基础,汽车行业正逐渐过渡至软件定义汽车的时代。
与此同时,汽车在交通中的角色上也有了转变。自动驾驶的出现使驾驶权逐渐向AI转移,汽车不再仅仅是驾驶员手里的执行系统,而是作为参与者在行驶过程中参与道路交通的决策。当自动驾驶逐渐解放驾驶员的双手,未来的汽车也将不仅仅是交通工具,而将作为一个大型移动智能终端为乘客带来更多体验,变成未来移动互联中的重要节点。
以往的垂直形态的产业链逐渐迭代成为产业网,并在这张网上形成了越来越多的生态圈,值得注意的是这个“圈子”甚至拓展到了海外。国家统计局数据显示,2022年上半年,我国汽车的出口数量达近121万辆,同比增长约77%,其中乘用车同比增长49.7%。可见,中国的市场在将汽车变成万物互联的节点的同时,也秉持着开放的态度,将先进的技术输送向全世界。
在此背景下,实现智能驾驶技术量产的快速落地就显得尤为重要。
智能驾驶深入演进 域控中间件迎挑战
整车通用的平台是否灵活、稳定,其中的应用层起着十分重要的作用。智能驾驶域控制器对中间件有着高实时性、高性能计算、高可靠性和功能安全与信息安全等方面的需求。
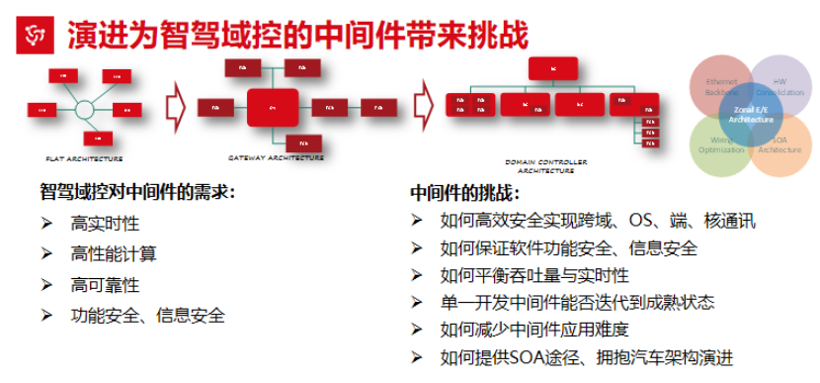
图片来源:中科创达演讲报告
目前智驾域牵涉到的芯片既有大算力的SOC,也有传统的MCU;从操作系统层面看,智驾域不仅涉及到QNX、 Linux等Posix接口的OS,也有MCU上的Osek或者其他微内核操作系统......这就要求中间件必须兼容多个平台,并承担起多芯片、多核、异构情况下的通讯。
针对这一需求,畅行智驾采用时间触发以太网作为通讯骨干网,自研中间件通讯组件RazorWare.RTE,解决了通讯兼容性问题,能够实现跨域、跨端、跨OS、跨核通信。且中间件RazorWare提供的服务可以部署在任意软件架构上,有极强的灵活性。
另外,针对形式不一的应用层南向接口,畅行智驾中间件提供丰富的接口形式来满足应用层的多元化需求。
当前,汽车行业已进入域控时代。畅行智驾希望为市场提供高功能安全、高吞吐量、高实时性的中间件,以满足自动驾驶对软件的需求和挑战。用一句话概括畅行智驾中间件解决方案,即:兼容性强,分“区” 而治,提供高算力所需吞吐量的同时,做到有“章”可循的实时性与功能安全。
技术为本 高性能中间件助智能驾驶量产落地
在自动驾驶领域,汽车软件最重要的两大诉求为安全性与实时性。畅行智驾以时间触发确定性调度策略,为域控制器提供有章可循的实时性与功能安全。
基于这一策略,可以在MCU侧实现完全的硬实时调度,在SOC侧做到相对硬实时的调度,中间件在微秒时间内便能完成资源调配。另外,畅行智驾中间件方案从计算链、任务、接口参数三个维度监控实时性与参数正确性,在软件层面达到ASIL-D的高功能等级安全。该策略在满足一定算力和吞吐量需求的同时,也能保证运行周期的相对稳定。
自动驾驶对域控制器最重要的需求之一就是平台的计算能力,其中包含AI计算能力和CPU计算能力。中间件在自动驾驶软件中起着承上启下的作用,因此如何满足应用层对吞吐量的需求成为尤其重要的一大课题。
畅行智驾中间件提供AP兼容的接口、主流的DDS框架,并且提供事件型触发调度的能力,能够发挥出SOC的极限吞吐量,并可容忍偶然的Overrun。且畅行智驾中间件提供了一套易用的CV pipeline框架,其中包含硬件加速的各种接口、对硬件优化的第三方算法库,从而使CV/AI算法移植难度大大降低。
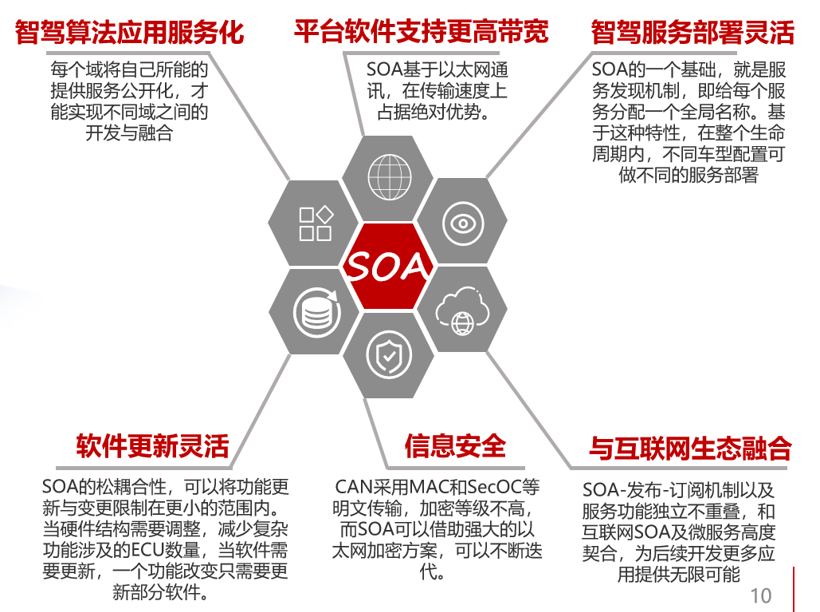
图片来源:中科创达演讲报告
自动驾驶软件的一大特征体现于快速迭代,于是如何适应SDV的变化成为巨大挑战。为了应对SDV的不断迭代,畅行智驾中间件兼容SOA的接口,并提供符合ISO标准的南北向接口,以降低自动驾驶移植难度、提升应用软件内聚性。
此外,为了提升中间件的易用性,畅行智驾提供AI、平台、数采三个层面的工具链,以支持主机厂的产品实现快速量产落地。
总而言之,畅行智驾将充分利用核心技术优势,基于领先的实时平台软件、先进的工具链、满足最高等级功能安全的研发流程以及可持续迭代的域控平台产品,推动智能驾驶量产落地。
重在实践 双循环验证推动智驾技术落地出海
作为承上启下的重要软件模块,中间件一面承载着所有硬件提供的服务,一面承担着应用层数据交互的任务。因此,中间件在成熟落地之前还需经过垂直验证。在中间件开发过程的验证环节,畅行智驾采用车-云、算法-硬件双循环垂直验证的形式,并加上生态的加持,促进中间件快速成熟。
外循环体现在“SDV+云服务+SOA接口”的循环验证。此前,畅行智驾与亚马逊AWS达成合作,共同研发SDV产品;针对SOA的服务接口层,畅行智驾跟随母公司中科创达加入SOAFEE组织,旨在快速推动SOA服务标准化。
在畅行智驾公司内部,则通过“算法+中间件+域控制器”的内循环进行系统级别的验证,并进行全系统大规模的路试,以确保中间件落地后的稳定性和可靠性。
未来,随着汽车架构不断演变、自动驾驶持续发展,软件定义汽车的拐点将提前来临,畅行智驾将充分利用中科创达在OS操作系统及实时平台软件的技术优势,深入探索和布局智能驾驶领域,并希望为行业提供更集中化的域控制器软硬件产品及解决方案,助力国内汽车自动驾驶行业“借道超车”,并向全世界输出先进的自动驾驶技术。
智能驾驶产业正迎来高速发展期。伴随着自动驾驶技术的高速发展,加速技术创新并推动前沿技术落地已成为行业内企业发展的首要驱动力。
技术即话语权。无论是对于芯片、硬件厂商还是软件供应商而言,智能驾驶赛道都是一次全新的机会。畅行智驾将充分利用核心技术优势,推动智能驾驶量产落地,加速汽车行业智能化变革进程,最终推动软件定义汽车与行业技术的不断进步。
来源:盖世汽车
作者:林品慧





