

 494
494
2019年,马斯克公开宣称:“激光雷达和高精度地图都是自动驾驶中错误的解决方案, 只会减慢自动驾驶商业化的速度。”言外之意,激光雷达价格过高无法普遍搭载于自动驾驶汽车上。
“太贵了,没必要” 图源:新出行
2021年5月,特斯拉博客宣布不再配备毫米波雷达,理由为与视觉方案产生冲突。
不久前的2022年10月,特斯拉宣布所有为北美、欧洲、中东制造的Model 3和Model Y都不再配备超声波雷达,2023年起交付的Model X及Model S也同样不再配备。这意味着,拒绝了激光雷达、毫米波雷达和超声波雷达的特斯拉,其Autopilot、FSD和主动安全功能将完全依靠纯视觉方案运行。
纵观业内自动驾驶技术布局,似乎以激光雷达为主的自驾方案才是大势所趋。从国内造车新势力激光雷达上车情况看,小鹏、蔚来、哪吒、威马、北汽、上汽、长城等造车品牌均有车型搭载。马斯克的执着,究竟是观念超前还是一意孤行?要分析特斯拉采用纯视觉方案的代价,我们先了解一下为什么激光雷达会被放弃。
今非昔比的激光雷达
激光雷达,或称为光学雷达,(英语LiDAR,Light Detection And Ranging)。它是一种光学遥感技术,通过向目标照射一束光(通常为脉冲激光)来测量目标的距离等参数。此前激光雷达在测绘学、考古学、地理学、大气学等领域有着广泛应用。
激光雷达的首次上车就是为了实现自动驾驶。2004年,美国国防部高级研究计划局为了能够找到为军方打造无人驾驶汽车的解决方案发起了DARPA无人驾驶车挑战赛。其中音响品牌Velodyne的CEO David Hall 打造了一台搭载了360°旋转激光雷达的自动驾驶汽车参加比赛,可惜的是赛车因为机械故障未能完赛,但它搭载的激光雷达引起了参赛选手的注意。2007年比赛再次开启,这次 David Hall并没有参赛,在53支报名队伍中,11支通过了资格测试,7支车队跑完了全程,而完赛车队中有6支搭载了Velodyne家的激光雷达。此后Velodyne名声大噪,时至今日仍是世界知名的激光雷达厂商。
此时上车的激光雷达属于纯机械式。它的激光发射部件在竖直方向上排布成激光光源线阵,并可通过透镜在竖直面内产生不同指向的激光光束;在步进电机的驱动下持续旋转,竖直面内的激光光束由“线”变成“面”,经旋转扫描形成多个激光“面”,从而实现探测区域内的3D 扫描。由于机械式激光雷达整体通过复杂的机械结构实现高频精准转动,在户外应用中,该类型雷达的平均失效时间近乎为1000-3000小时,很难达到车规标准。且多个激光发射器垂直排列导致花费的调试时间极长,客观上增加了雷达的成本,单个雷达的价格甚至达到数十万人民币。
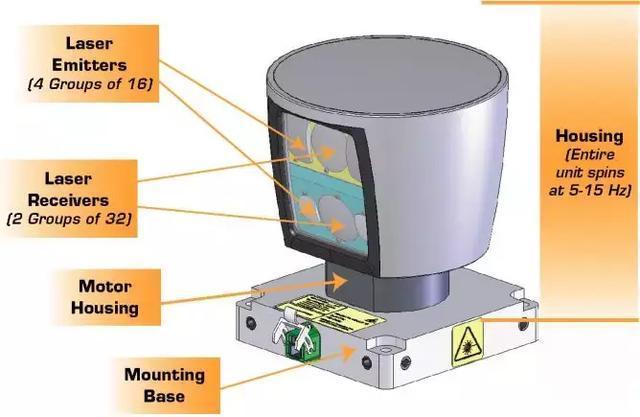
机械式激光雷达 图源:知乎
若特斯拉执意搭载价格如此高的激光雷达,单个雷达的价格甚至要超过整车其他部分的总和,所以马斯克的判断,在那时并不算失误。
可以说今天激光雷达的成本相较于初代已经相当低廉,从媒体爆料的车辆发生剐蹭事故后更换激光雷达的费用看,大疆、华为的激光雷达价格已经降到几千元人民币。激光雷达价格砍去两个零背后,是技术革新与市场扩大。
机械式激光雷达被发明后,人们逐渐发现该项技术在自动驾驶领域的潜力。相比视觉方案,激光雷达可以不依赖复杂的AI算法时间别外部环境,其特殊的结构也可以便捷的识别障碍物到车体的距离。所以,当谷歌依靠激光雷达入局自动驾驶后,世界上便涌现了一大批追随者。除了老牌激光雷达企业Velodyne外,美国的Luminar、法国的法雷奥(Valeo),中国的速腾聚创、大疆览沃、华为等纷纷入局激光雷达。大规模的资本投入与充分的市场竞争让激光雷达的价格一降再降。
众多玩家入局,自然也能“卷”出新技术与新方案。我们在目前采用激光雷达方案的自动驾驶车辆上,已经看不到自动驾驶刚刚起步时车顶那些 “熙熙攘攘”的传感器,因为混合式固态激光雷达出现了。
前文提到,激光雷达的原理本质上是依靠激光点到线,最后多条线组成面来探测环境。所以我们可以让激光发射器与接收器固定,通过内部转镜或MEMS控制平面镜或透镜的方式来控制光路的扫描。这样做就可以减少很多激光发射器与接收器的堆料,也大大降低了多个探测器之间调试的难度。
我们以今年推出的华为等效96线激光雷达举例,媒体推测该款型号采用MEMS微振镜方案。MEMS 微振镜本质上是一种硅基半导体元器件,内部集成了「可动」的微型镜面来,利用电磁驱动或静电驱动,来实现扫描动作。MEMS微振镜翻案相对于机械式或转镜雷达,其结构更精巧,体积更小,由于该项技术在投影显示领域应用多年,技术也较为成熟。不过缺点是视场相对较小,无法和机械式雷达的360°相比,需要多了雷达配合才能做到全范围扫描。除了微振镜方案外,激光雷达还有光学相控阵式(OPA)、泛光面阵式(FLASH)等方案,无论哪种模式,其价格都较初代更低,性能也明显增强。
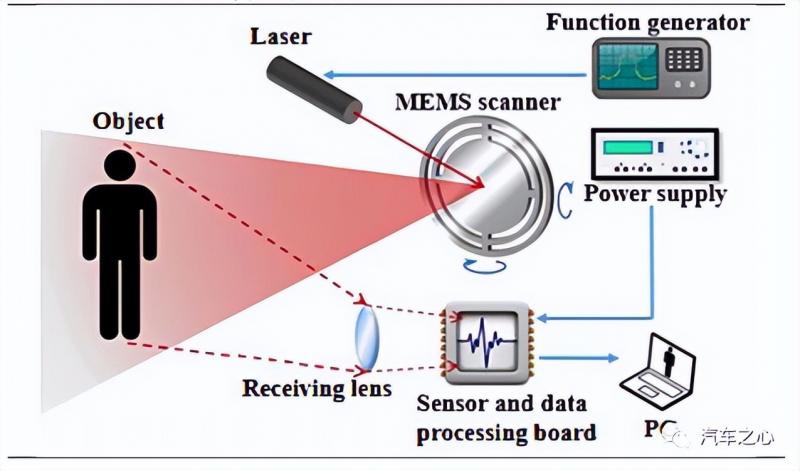
MEMS 微振镜技术 图源:汽车之心
回头看特斯拉的技术路线,目前激光雷达已经做到“物美价廉”,马斯克拒绝激光雷达最重要的理由—价格问题已经不存在,但特斯拉依旧沿着纯视觉方案的路走下去,其代价又是什么呢?
一、纯视觉方案需要多目摄像头配合
人类之所以可以判断外界物体离我们的远近,是因为我们拥有“双目测距”的能力。纯视觉方案也同样需要两个或以上的摄像头相互配合,来达到对外界物体距离的精准判断。而且摄像头无法像人眼一样频繁和快速变换焦距,因此也需要多个摄像头来解决不同距离下的识别清晰度的问题。
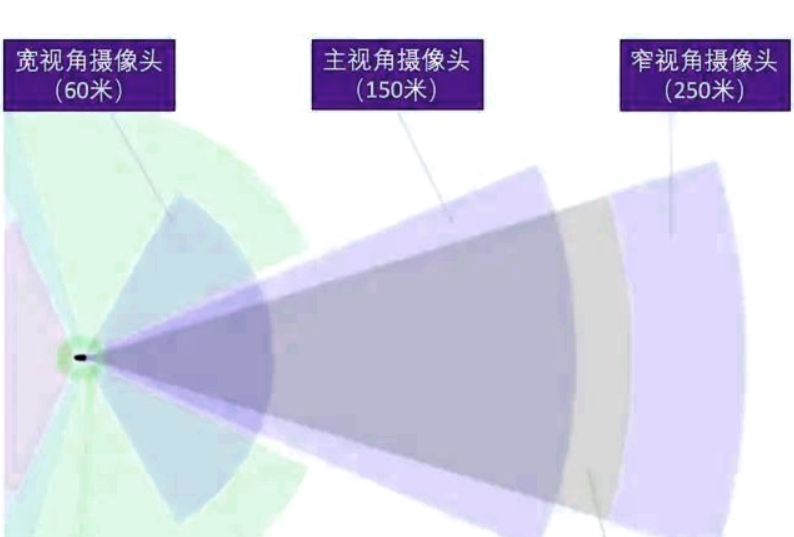
多目摄像头覆盖范围 图源:互联网
此外,车载摄像头对外界判断的准确性,与摄像头的分辨率、信噪比以及动态范围等参数息息相关。
视觉方案自动驾驶技术,本质上是将摄像头上传的一张张2D图像通过AI算法建模在芯片中还原成3D图像,摄像头的成像质量关乎AI识别的准确性。分辨率与信噪比越低,成像就会越模糊,AI算法判断的准确性也会大大降低,当噪点多到与外界物体无法分辨时,自动驾驶就无能为力了。分辨率可以通过升级摄像头CMOS完成,然而在暗光环境中,摄像头会无法避免的出现大量噪点,这也意味着,采用纯视觉方案的自动驾驶,在夜晚光源不足时行车安全性将大大降低。未来纯视觉方案自动驾驶或将搭载夜视摄像头来填补这一缺陷,不过这也会失去对颜色的判断力。
从人类视角看,出入隧道等大光比环境时,极易发生交通事故。摄像头往往也会面临这个问题。所以,必须使用高动态范围的摄像头来保证自动驾驶系统在面对类似情况时的安全性。但这无论如何都比不上随时随地探查外界的且不受外界光照影响的毫米波雷达与激光雷达。
大光比情况 图源:知乎
二、视觉算法的局限性
关于纯视觉方案的算法问题,特斯拉此前出现过误判情况。
2021年三月,一辆特斯拉Model Y在美国底特律西南部一个十字路口撞上了一辆白色半挂卡车。事故现场十分惨烈,据事故报告称,事发当时该车开启了Autopilot模式,不过系统AI算法将停在路上的白色货车车厢识别为了天空,导致车辆没有进行任何刹车行为就直直的撞了上去。虽然特斯拉已经调整了算法,但那时车上如果搭载了毫米波或是激光雷达,这样的惨剧也许就不会发生。
特斯拉此前是搭载过毫米波雷达的,不过“幽灵刹车”事件却让毫米波雷达被踢了出去。
当车辆即将驶入桥下的时候,毫米波雷达会检测到桥的存在,但分辨率不足无法判断这是“车”还是“桥”。这时就需要摄像头来判断这个物体具体是什么,不过由于关联了毫米波雷达,导致摄像头的分辨率也不足以判断物体的具体形态。假如此时有一辆慢速汽车在前方行驶,但还不需要刹车,这时系统就会将“慢速汽车”和“静态未知物体”联系起来,导致不必要的刹车发生。于是在2021年5月,特斯拉取消在新车型上安装毫米波雷达。
据专家判断:“‘幽灵刹车’事件是由于特斯拉的毫米波雷达没有屏蔽静态物体导致的,视觉的精度受限于关联的雷达而不是它本身的精度也是问题关键。”事实上融合感知方案被国内外大多数厂商采用,且摄像头与毫米波雷达的组合较为成熟,中高端车型已经普遍配装。特斯拉因为调试问题剔除雷达似乎是因噎废食了。
还有一个例子是路上飘动的塑料袋,人眼可轻易识别,但摄像头却很难判断这个物体是什么,也难以做出下一步判断,容易造成不必要的危险。而激光雷达的3D能力则可轻易分辨前方物体的形态,若对车辆行驶影响不大则不会做出避让动作。
写在最后
总的来说,虽然激光雷达持续降价,但价格仍是传感器中较贵的,纯视觉方案在今天仍是一种极具性价比的选择。据特斯拉官方解释,取消雷达后,他们将启用新技术,实现Autopilot高清空间定位、更远距离可见性以及识别和区分对象的能力,看起来马斯克也对自家的视觉算法相当有自信。
马斯克曾表达他对摄像头的看法:
“在雷达波长下,现实世界看起来像一个奇怪的幽灵世界。除了金属,几乎所有东西都是半透明的。”
“传感器的本质是比特流,摄像头的信息量要比雷达和激光雷达高几个数量级。雷达必须有意义地增加比特流的信号和噪声,以使其值得集成。”
“随着视觉处理能力的提高,摄像头的性能将会远远甩开当下的雷达。”
但纯视觉方案仍有相当多无法避开的局限性。有传言称特斯拉没有真正放弃其他方案的尝试,2023年毫米波雷达可能会回归。马斯克目前执着于纯视觉方案的决定是对是错,相信市场自会给出判断结果。
来源: 与非网,作者: 刘浩然,原文链接: https://www.eefocus.com/article/529423.html




.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)

