

 149
149
一、行业背景:Pixhawk 6X Pro 飞控 + Orin NX 载板一体化方案应用价值
低空经济工业化进程加速,测绘、电力巡检、安防无人机需要飞控姿态控制 + 边缘 AI 实时处理双核心架构。Holybro Pixhawk 6X Pro(合力 6X 飞控模块)搭载 3 路冗余工业 IMU(ADIS16470),支持 - 40℃~85℃宽温工作,是工业级标准化飞控硬件载体Holybro;NVIDIA Jetson Orin NX 具备 20TOPS 算力,负责图像识别、目标检测、实时图传解码,二者通过 Pixhawk 标准总线 + 千兆以太网通信,依赖专用载板实现电源时序、信号隔离、接口拓展一体化集成。
常规消费级 PCB 加工无法满足无人机高空震动、温差、电磁干扰工况,Orin NX 载板集成 260Pin SO-DIMM BGA、PCIe4.0、MIPI、多路 CAN 总线、飞控总线连接器,高密度布线 + 高精度贴片叠加严苛可靠性要求,成为无人机 PCBA 代工核心技术门槛。本文基于 IPC 电子组装标准、NVIDIA Jetson 官方设计手册、PX4 飞控硬件规范,完整拆解适配 Pixhawk 6X Pro 的 Orin NX 载板全套 PCBA 加工管控体系。
一、行业背景:Pixhawk 6X Pro 飞控 + Orin NX 载板一体化方案应用价值
低空经济工业化进程加速,测绘、电力巡检、安防无人机需要飞控姿态控制 + 边缘 AI 实时处理双核心架构。Holybro Pixhawk 6X Pro(合力 6X 飞控模块)搭载 3 路冗余工业 IMU(ADIS16470),支持 - 40℃~85℃宽温工作,是工业级标准化飞控硬件载体Holybro;NVIDIA Jetson Orin NX 具备 20TOPS 算力,负责图像识别、目标检测、实时图传解码,二者通过 Pixhawk 标准总线 + 千兆以太网通信,依赖专用载板实现电源时序、信号隔离、接口拓展一体化集成。
常规消费级 PCB 加工无法满足无人机高空震动、温差、电磁干扰工况,Orin NX 载板集成 260Pin SO-DIMM BGA、PCIe4.0、MIPI、多路 CAN 总线、飞控总线连接器,高密度布线 + 高精度贴片叠加严苛可靠性要求,成为无人机 PCBA 代工核心技术门槛。本文基于 IPC 电子组装标准、NVIDIA Jetson 官方设计手册、PX4 飞控硬件规范,完整拆解适配 Pixhawk 6X Pro 的 Orin NX 载板全套 PCBA 加工管控体系。

参考文献前置标注
[1] NVIDIA. Jetson Orin NX Series Design Guide DG-10931-001_v1.1 [Z]. Mouser 官方技术文档,2025
[2] Holybro. Pixhawk 6X Pro FMUv6X 硬件规格手册 [EB/OL].https://docs.holybro.com,2026
[3] IPC-A-610G 电子组件可接受性标准
[4] IPC-2221A PCB 通用设计规范
[5] 中国无人机产业联盟.2026 工业无人机硬件可靠性白皮书
[6] 惠新遥。基于 STM32 的复合式无人机飞控系统设计 [J]. 软件工程与应用,2022,11 (2)
[7] Microchip. AN2190 以太网差分阻抗匹配应用笔记
二、Pixhawk 6X Pro 飞控与 Jetson Orin NX 载板硬件适配核心需求
2.1 Pixhawk 6X Pro 六轴飞控硬件电气与接口约束
合力 Pixhawk 6X Pro 飞控模块采用模块化 FMU 架构,核心硬件约束直接决定载板 PCB 布局规则:
- 双电源域:飞控模块输入 6V,伺服输出支持 0~36V;Orin NX 核心供电 12V,载板需独立隔离两路电源,避免动力回路干扰 IMU 传感器;
- 通信总线:2 路独立 CAN 总线、100M 以太网、Pixhawk 专用高速总线、多路 I2C/UART,载板必须做差分阻抗匹配、模拟 / 数字地层分割;
- 传感器冗余:3 组独立 IMU、双气压计,载板预留独立 LDO 供电电路,每路传感器电源增加磁珠滤波;
- 机械尺寸:飞控模块8×31.8mm,Orin NX 模组 70×45mm,载板需在 110×60mm 空间内完成全部器件布局,板厚 1.0mm~1.2mm轻量化设计。
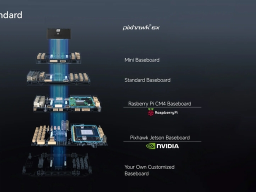
Pixhawk总线载板架构
Pixhawk6X FMU主板
2.2 Jetson Orin NX 载板专属设计硬性规范(依据文献 [1])
- SO-DIMM 260Pin BGA 焊盘:0.4mm 细间距,阻焊定义焊盘,钢网开口缩小 10% 防桥连;
- 高速信号:0 差分 85Ω 阻抗、USB3.2 差分 90Ω,MIPI CSI 等长线差分对等长误差≤5mil;
- 电源时序:12V 主输入→5V 模组供电→3.3V 外设→1.8V 飞控总线,上电时序误差控制<1ms;
- 散热通道:载板底层大面积铜皮 + 导热过孔阵列,适配 Orin NX 被动散热片安装位。
三、适配 Pixhawk6X Pro 的 Orin NX 无人机载板 PCB 设计 DFM 工艺管控
DFM 可制造性设计直接降低 SMT 虚焊、开路、电磁干扰不良率,本公司针对飞控 + AI 一体化载板制定高于 IPC 标准的收紧管控指标:
- 叠层与阻抗设计
采用 6 层板结构:信号层 1 - 地层 - 电源层 - 地层 - 高速信号层 2 - 底层;飞控模拟 IMU 走线单独分配内层,与 Orin NX 数字高速层用地层完全隔离,规避数字噪声导致姿态漂移。差分线严格遵循文献 [1] 阻抗参数,3W 隔离原则降低串扰。
- BGA 区域优化(Orin NX 核心风险点)
260Pin SO-DIMM BGA 下方禁止穿过高速信号线,全部电源 / 地过孔阵列化,单 BGA 区域过孔数量≥120 个,平衡散热与电流承载;PCB 翘曲度管控≤0.3%(行业通用 IPC 标准 0.5%,无人机工况再收紧标准)。
- Pixhawk 总线连接器布局
飞控总线板对板连接器靠近以太网 PHY 芯片,差分走线长度差控制<3mil,连接器四周增加 360° 接地屏蔽焊盘,匹配 AN2190 以太网隔离规范 [7],消除高空电磁干扰导致的飞控断连故障。
- 轻量化抗震布局
重量型器件(电源电感、Orin 模组、屏蔽罩)集中布置在载板中心区域,边角仅放置小型阻容件,适配无人机高频震动环境。
四、Jetson Orin NX 载板 PCBA 全流程精密加工工艺(适配 Pixhawk6X 飞控配套组装)
4.1 SMT 贴片:细间距 BGA + 高精度传感器分级管控
Orin NX 0.4mm BGA、Pixhawk 配套 IMU(ADIS16470)、以太网 PHY 为三大高风险器件,分两段贴片工艺:
- 钢网定制:BGA 区域 08mm加厚纳米钢网,飞控精密传感器焊盘钢网开口缩小 10%,防止锡膏过量短路;锡膏选用无铅SAC305,抗疲劳性能适配 - 40~120℃温度冲击。
- 贴装精度管控:
分 10 段温区,恒温区峰值 245℃,保温时长 >60s;IMU 传感器区域局部降温保护,规避高温破坏内部 MEMS 结构,依据文献 [6] 飞控传感器焊接温控标准。
4.2 BGA 底部填充加固(无人机专属抗震工艺,核心差异化优势)
针对无人机持续震动工况,所有 Orin NX BGA 芯片增加环氧底部填充胶工艺:
- 填充胶选用双组份低温固化型,热膨胀系数匹配 PCB 基材;
- 填充后真空脱泡,确保锡球缝隙 100% 填充;固化后抗振动等级达 10~2000Hz,满足工业无人机起降冲击测试;
- Pixhawk 飞控总线连接器焊点增加 UV 胶包封,防止高空温差冷热循环脱焊。
4.3 选择性波峰焊与连接器组装
载板外接 CAN 总线、GPS、伺服 PWM 大电流连接器采用选择性波峰焊,避免高温损伤周边 MIPI 高速器件;
4.4 全维度检测体系(高于 IPC-A-610G 验收标准 [3])
- AOI 光学检测:双面全覆盖,识别 0201 微小阻容件偏位、少锡、立碑;
- X-Ray 100% 全检 Orin NX BGA 焊点:检测空洞率≤5%,无虚焊、冷焊、桥连;
- ICT 在线电路通断、绝缘阻抗、电源时序全功能测试,模拟 12V 输入 / 飞控 6V 双电源切换工况;
- 飞控通信联调测试:搭载 Pixhawk 6X Pro 飞控模块,以太网、CAN 总线、Pixhawk 总线全通道数据收发验证,消除通信丢包问题。
五、Orin NX+Pixhawk6X Pro 一体化载板可靠性专项测试方案
依据 2026 无人机硬件白皮书 [5],出厂前执行全套工业级环境可靠性测试,覆盖全作业场景:
- 高低温循环测试:-40℃~85℃循环 100 次,单次循环 2h,测试后 IMU 零点漂移≤0.02°/s;
- 随机振动测试:10~2000Hz 三轴振动 4h,模拟高空气流颠簸,BGA 焊点无开裂;
- 温度冲击:冷热箱快速切换,温差 120℃,50 轮无通信故障;
- EMC 电磁兼容测试:依据 GJB151B,传导干扰、辐射干扰达标,无飞控姿态跳变;
- 湿热老化:85℃/85RH% 48h,绝缘阻抗≥1000MΩ,适配南方高湿巡检环境。
六、Pixhawk 6X Pro 配套 Jetson Orin NX 载板 PCBA 量产常见故障与工艺解决方案
表格
| 典型不良现象 | 故障根源 | 本公司定制工艺解决方案 |
| Orin NX 算力偶发掉载,图像传输卡顿 | PCIe 差分阻抗不匹配、地层分割不合理 | 6 层分层隔离设计,差分等长严格管控,X-Ray 检测 BGA 空洞率 |
| Pixhawk 飞控姿态漂移,悬停偏移大 | IMU 传感器焊接高温损伤、数字电源串扰 | 回流焊局部降温、独立 LDO 分路供电、磁珠滤波电路 |
| 高空飞行以太网断连、CAN 总线丢包 | 连接器屏蔽不足、差分走线跨地层 | 360° 接地屏蔽焊盘,高速走线完整回流地层,AN2190 阻抗匹配设计 |
| 长期震动后 Orin 模组无法上电 | BGA 锡球疲劳开裂 | 全板 BGA 底部填充加固工艺,加厚抗震锡膏 |
| 低温工况电源掉压、飞控重启 | 大电流走线铜厚不足、过孔偏少 | 电源铜厚 2oz,电源区域阵列化过孔,低温宽压 LDO 选型 |
七、本公司无人机一体化载板 PCBA 代工交付能力(官网转化板块,提升客户信任)
- 工艺适配能力
专业承接 Jetson 全系列(Orin NX/Orin AGX/Xavier NX)载板 + PCBA 一站式加工,深度适配 Holybro 全系列 Pixhawk 飞控(Pixhawk 6X Pro/5X/4),支持定制化 6~10 层高密度板、0.4mm 细间距 BGA、军工级抗震底部填充工艺;
- 品控体系
全流程遵循 IPC-A-610G、NVIDIA 硬件规范、PX4 飞控电气标准,每批次出具 X-Ray 检测报告、可靠性测试报告、BOM 元器件溯源清单;
- 交付规模
支持样机打样(3~7 天)、小批量试产、大批量量产,配套飞控 + AI 载板一体化组装、整机联调测试服务,覆盖测绘、电力、安防、物流全品类工业无人机客户;
- 技术支持
提供 DFM 前置评审、PCB 阻抗仿真、SI 信号完整性仿真,提前规避飞控与 Orin 模组通信兼容问题,降低客户改版成本。
八、FAQ
Q1:Pixhawk 6X Pro 飞控是否可以直接对接原厂 Jetson 载板?
A1:Holybro 原厂 Jetson 底板仅支持基础通信,无独立 IMU 隔离电源、无抗震加固工艺,工业无人机长期飞行易出现姿态漂移、BGA 脱焊;定制 PCBA 载板可独立分割飞控模拟域与 Orin 数字域,增加底部填充、屏蔽电路,适配户外严苛工况,是工业机型量产刚需。
Q2:Jetson Orin NX 载板 BGA 空洞率标准控制多少合适?
A2:消费级主板 IPC 标准允许空洞率 5%,无人机载板因持续震动,必须收紧至≤5%,本公司通过定制钢网、真空填充、X-Ray 全检三重管控,稳定控制空洞率 1%~2%。
Q3:Pixhawk6X Pro 六轴飞控和 Orin NX 通信选用以太网还是 Pixhawk 总线?
A3:高速图像 AI 传输优先千兆以太网(匹配文献 [7] 差分阻抗设计),实时姿态控制采用 Pixhawk 专用总线双备份,载板双链路冗余设计,单一通道故障不影响整机飞行安全。
九、总结
工业无人机 AI + 飞控一体化架构是低空经济核心发展方向,Holybro Pixhawk 6X Pro 六轴飞控搭配 Jetson Orin NX 载板的整机稳定性,核心取决于 PCBA 加工精度、抗震工艺、电磁隔离管控三大维度。本文基于 NVIDIA、Holybro 官方技术文档、IPC 国际电子组装标准,完整输出从 PCB DFM、SMT 精密贴片、BGA 加固、全维度检测到可靠性测试的闭环工艺方案,可解决市面通用载板震动脱焊、飞控信号干扰、低温算力不稳等量产痛点。
智联科迅具备丰富无人机高密度载板代工经验,可提供从 PCB 制版、元器件采购、SMT 组装、功能测试、可靠性验证一站式 PCBA 服务,为工业无人机整机厂商提供稳定、可量产、高可靠的 Orin NX+Pixhawk 6X Pro 一体化硬件解决方案。

参考文献前置标注
[1] NVIDIA. Jetson Orin NX Series Design Guide DG-10931-001_v1.1 [Z]. Mouser 官方技术文档,2025
[2] Holybro. Pixhawk 6X Pro FMUv6X 硬件规格手册 [EB/OL].https://docs.holybro.com,2026
[3] IPC-A-610G 电子组件可接受性标准
[4] IPC-2221A PCB 通用设计规范
[5] 中国无人机产业联盟.2026 工业无人机硬件可靠性白皮书
[6] 惠新遥。基于 STM32 的复合式无人机飞控系统设计 [J]. 软件工程与应用,2022,11 (2)
[7] Microchip. AN2190 以太网差分阻抗匹配应用笔记
二、Pixhawk 6X Pro 飞控与 Jetson Orin NX 载板硬件适配核心需求
2.1 Pixhawk 6X Pro 六轴飞控硬件电气与接口约束
合力 Pixhawk 6X Pro 飞控模块采用模块化 FMU 架构,核心硬件约束直接决定载板 PCB 布局规则:
- 双电源域:飞控模块输入 6V,伺服输出支持 0~36V;Orin NX 核心供电 12V,载板需独立隔离两路电源,避免动力回路干扰 IMU 传感器;
- 通信总线:2 路独立 CAN 总线、100M 以太网、Pixhawk 专用高速总线、多路 I2C/UART,载板必须做差分阻抗匹配、模拟 / 数字地层分割;
- 传感器冗余:3 组独立 IMU、双气压计,载板预留独立 LDO 供电电路,每路传感器电源增加磁珠滤波;
- 机械尺寸:飞控模块8×31.8mm,Orin NX 模组 70×45mm,载板需在 110×60mm 空间内完成全部器件布局,板厚 1.0mm~1.2mm轻量化设计。
Pixhawk总线载板架构
Pixhawk6X FMU主板
2.2 Jetson Orin NX 载板专属设计硬性规范(依据文献 [1])
- SO-DIMM 260Pin BGA 焊盘:0.4mm 细间距,阻焊定义焊盘,钢网开口缩小 10% 防桥连;
- 高速信号:0 差分 85Ω 阻抗、USB3.2 差分 90Ω,MIPI CSI 等长线差分对等长误差≤5mil;
- 电源时序:12V 主输入→5V 模组供电→3.3V 外设→1.8V 飞控总线,上电时序误差控制<1ms;
- 散热通道:载板底层大面积铜皮 + 导热过孔阵列,适配 Orin NX 被动散热片安装位。
三、适配 Pixhawk6X Pro 的 Orin NX 无人机载板 PCB 设计 DFM 工艺管控
DFM 可制造性设计直接降低 SMT 虚焊、开路、电磁干扰不良率,本公司针对飞控 + AI 一体化载板制定高于 IPC 标准的收紧管控指标:
- 叠层与阻抗设计
采用 6 层板结构:信号层 1 - 地层 - 电源层 - 地层 - 高速信号层 2 - 底层;飞控模拟 IMU 走线单独分配内层,与 Orin NX 数字高速层用地层完全隔离,规避数字噪声导致姿态漂移。差分线严格遵循文献 [1] 阻抗参数,3W 隔离原则降低串扰。
- BGA 区域优化(Orin NX 核心风险点)
260Pin SO-DIMM BGA 下方禁止穿过高速信号线,全部电源 / 地过孔阵列化,单 BGA 区域过孔数量≥120 个,平衡散热与电流承载;PCB 翘曲度管控≤0.3%(行业通用 IPC 标准 0.5%,无人机工况再收紧标准)。
- Pixhawk 总线连接器布局
飞控总线板对板连接器靠近以太网 PHY 芯片,差分走线长度差控制<3mil,连接器四周增加 360° 接地屏蔽焊盘,匹配 AN2190 以太网隔离规范 [7],消除高空电磁干扰导致的飞控断连故障。
- 轻量化抗震布局
重量型器件(电源电感、Orin 模组、屏蔽罩)集中布置在载板中心区域,边角仅放置小型阻容件,适配无人机高频震动环境。
四、Jetson Orin NX 载板 PCBA 全流程精密加工工艺(适配 Pixhawk6X 飞控配套组装)
4.1 SMT 贴片:细间距 BGA + 高精度传感器分级管控
Orin NX 0.4mm BGA、Pixhawk 配套 IMU(ADIS16470)、以太网 PHY 为三大高风险器件,分两段贴片工艺:
- 钢网定制:BGA 区域 08mm加厚纳米钢网,飞控精密传感器焊盘钢网开口缩小 10%,防止锡膏过量短路;锡膏选用无铅SAC305,抗疲劳性能适配 - 40~120℃温度冲击。
- 贴装精度管控:
- Orin NX SO-DIMM 模组贴装精度 ±0.02mm;
- ADIS16470 工业 IMU 六面视觉定位,角度偏差≤0.1°,杜绝焊接应力导致传感器零点漂移;
- 回流焊温区曲线定制(区别普通消费电子板)
分 10 段温区,恒温区峰值 245℃,保温时长 >60s;IMU 传感器区域局部降温保护,规避高温破坏内部 MEMS 结构,依据文献 [6] 飞控传感器焊接温控标准。
4.2 BGA 底部填充加固(无人机专属抗震工艺,核心差异化优势)
针对无人机持续震动工况,所有 Orin NX BGA 芯片增加环氧底部填充胶工艺:
- 填充胶选用双组份低温固化型,热膨胀系数匹配 PCB 基材;
- 填充后真空脱泡,确保锡球缝隙 100% 填充;固化后抗振动等级达 10~2000Hz,满足工业无人机起降冲击测试;
- Pixhawk 飞控总线连接器焊点增加 UV 胶包封,防止高空温差冷热循环脱焊。
4.3 选择性波峰焊与连接器组装
载板外接 CAN 总线、GPS、伺服 PWM 大电流连接器采用选择性波峰焊,避免高温损伤周边 MIPI 高速器件;
4.4 全维度检测体系(高于 IPC-A-610G 验收标准 [3])
- AOI 光学检测:双面全覆盖,识别 0201 微小阻容件偏位、少锡、立碑;
- X-Ray 100% 全检 Orin NX BGA 焊点:检测空洞率≤5%,无虚焊、冷焊、桥连;
- ICT 在线电路通断、绝缘阻抗、电源时序全功能测试,模拟 12V 输入 / 飞控 6V 双电源切换工况;
- 飞控通信联调测试:搭载 Pixhawk 6X Pro 飞控模块,以太网、CAN 总线、Pixhawk 总线全通道数据收发验证,消除通信丢包问题。
五、Orin NX+Pixhawk6X Pro 一体化载板可靠性专项测试方案
依据 2026 无人机硬件白皮书 [5],出厂前执行全套工业级环境可靠性测试,覆盖全作业场景:
- 高低温循环测试:-40℃~85℃循环 100 次,单次循环 2h,测试后 IMU 零点漂移≤0.02°/s;
- 随机振动测试:10~2000Hz 三轴振动 4h,模拟高空气流颠簸,BGA 焊点无开裂;
- 温度冲击:冷热箱快速切换,温差 120℃,50 轮无通信故障;
- EMC 电磁兼容测试:依据 GJB151B,传导干扰、辐射干扰达标,无飞控姿态跳变;
- 湿热老化:85℃/85RH% 48h,绝缘阻抗≥1000MΩ,适配南方高湿巡检环境。
六、Pixhawk 6X Pro 配套 Jetson Orin NX 载板 PCBA 量产常见故障与工艺解决方案
表格
| 典型不良现象 | 故障根源 | 本公司定制工艺解决方案 |
| Orin NX 算力偶发掉载,图像传输卡顿 | PCIe 差分阻抗不匹配、地层分割不合理 | 6 层分层隔离设计,差分等长严格管控,X-Ray 检测 BGA 空洞率 |
| Pixhawk 飞控姿态漂移,悬停偏移大 | IMU 传感器焊接高温损伤、数字电源串扰 | 回流焊局部降温、独立 LDO 分路供电、磁珠滤波电路 |
| 高空飞行以太网断连、CAN 总线丢包 | 连接器屏蔽不足、差分走线跨地层 | 360° 接地屏蔽焊盘,高速走线完整回流地层,AN2190 阻抗匹配设计 |
| 长期震动后 Orin 模组无法上电 | BGA 锡球疲劳开裂 | 全板 BGA 底部填充加固工艺,加厚抗震锡膏 |
| 低温工况电源掉压、飞控重启 | 大电流走线铜厚不足、过孔偏少 | 电源铜厚 2oz,电源区域阵列化过孔,低温宽压 LDO 选型 |
七、本公司无人机一体化载板 PCBA 代工交付能力(官网转化板块,提升客户信任)
- 工艺适配能力
专业承接 Jetson 全系列(Orin NX/Orin AGX/Xavier NX)载板 + PCBA 一站式加工,深度适配 Holybro 全系列 Pixhawk 飞控(Pixhawk 6X Pro/5X/4),支持定制化 6~10 层高密度板、0.4mm 细间距 BGA、军工级抗震底部填充工艺;
- 品控体系
全流程遵循 IPC-A-610G、NVIDIA 硬件规范、PX4 飞控电气标准,每批次出具 X-Ray 检测报告、可靠性测试报告、BOM 元器件溯源清单;
- 交付规模
支持样机打样(3~7 天)、小批量试产、大批量量产,配套飞控 + AI 载板一体化组装、整机联调测试服务,覆盖测绘、电力、安防、物流全品类工业无人机客户;
- 技术支持
提供 DFM 前置评审、PCB 阻抗仿真、SI 信号完整性仿真,提前规避飞控与 Orin 模组通信兼容问题,降低客户改版成本。
八、FAQ
Q1:Pixhawk 6X Pro 飞控是否可以直接对接原厂 Jetson 载板?
A1:Holybro 原厂 Jetson 底板仅支持基础通信,无独立 IMU 隔离电源、无抗震加固工艺,工业无人机长期飞行易出现姿态漂移、BGA 脱焊;定制 PCBA 载板可独立分割飞控模拟域与 Orin 数字域,增加底部填充、屏蔽电路,适配户外严苛工况,是工业机型量产刚需。
Q2:Jetson Orin NX 载板 BGA 空洞率标准控制多少合适?
A2:消费级主板 IPC 标准允许空洞率 5%,无人机载板因持续震动,必须收紧至≤5%,本公司通过定制钢网、真空填充、X-Ray 全检三重管控,稳定控制空洞率 1%~2%。
Q3:Pixhawk6X Pro 六轴飞控和 Orin NX 通信选用以太网还是 Pixhawk 总线?
A3:高速图像 AI 传输优先千兆以太网(匹配文献 [7] 差分阻抗设计),实时姿态控制采用 Pixhawk 专用总线双备份,载板双链路冗余设计,单一通道故障不影响整机飞行安全。
九、总结
工业无人机 AI + 飞控一体化架构是低空经济核心发展方向,Holybro Pixhawk 6X Pro 六轴飞控搭配 Jetson Orin NX 载板的整机稳定性,核心取决于 PCBA 加工精度、抗震工艺、电磁隔离管控三大维度。本文基于 NVIDIA、Holybro 官方技术文档、IPC 国际电子组装标准,完整输出从 PCB DFM、SMT 精密贴片、BGA 加固、全维度检测到可靠性测试的闭环工艺方案,可解决市面通用载板震动脱焊、飞控信号干扰、低温算力不稳等量产痛点。
智联科迅具备丰富无人机高密度载板代工经验,可提供从 PCB 制版、元器件采购、SMT 组装、功能测试、可靠性验证一站式 PCBA 服务,为工业无人机整机厂商提供稳定、可量产、高可靠的 Orin NX+Pixhawk 6X Pro 一体化硬件解决方案。







